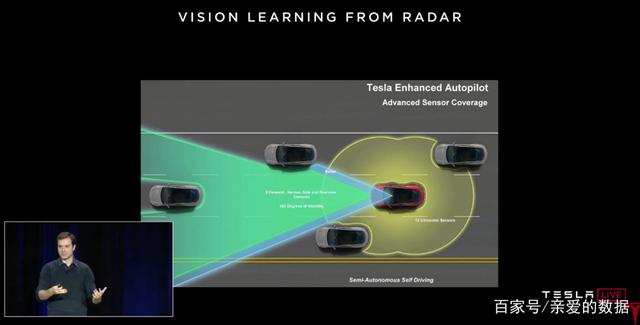
特斯拉用“车队学习网络”(Fleet Learning Network)策略,调动量产车把测绘任务以“众包”的形式进行数据采集,可以说所有在路上跑的特斯拉车型都是实时数据在线的,他们通过在7.0系统固件中的测试版自动驾驶辅助功能,调用全车所有的传感器来收数据,所有的数据(不包含隐私信息)都会上传给中央处理器。
七、惯性测量单元(IMU)
为了能让无人驾驶系统更高频率地获取定位信息,就必须引入频率更高的传感器。这就是IMU(Inertial Measurement Unit)惯性测量单元。陀螺仪和加速度计是IMU的主要元件,其精度直接影响到惯性系统的精度。
手机上也有IMU,但是是低配,因为成本和精度都不高,记个行走的步数没有什么问题,高端的就是宇航级别的产品,导弹、宇宙飞船、航天飞机都用,短时间内推算精度高,误差小,算不错。
工作原理是:从GPS得到的经纬度信息作为输入信号传入IMU,再通过串口线与控制器的连接,以此获取更高频率的定位结果。
学术上的语言是:测量在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息,以牛顿力学定律为基础。
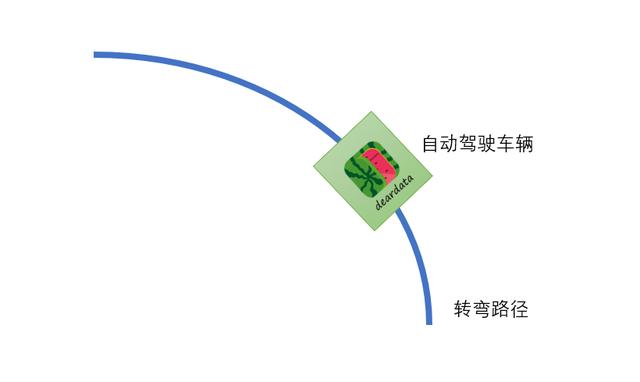
一般GPS+IMU就能给出定位输出,是钢筋混凝土一般的合作伙伴。有了GPS+IMU,车辆每走一小步,便能重新进行方向盘转角的计算。IMU价格从几百、几千到几万元都有,那要看自动驾驶汽车需要的定位精度。
“长江长江,我是黄河,你在哪?”“黄河,你好,GPS+IMU告诉我,我在长江。”
八、里程计(Odometer)
实用当中,里程计主要用于在没有任何其他全局定位信息下,允许车辆仅使用里程计递推自己位置。假设车辆控制允许最大误差是0.3m,那么1%的里程计允许你前进30米。自动驾驶定位要求是能够提供绝对位置,而里程计(odometry)是提供相对位置,相对位置做得再好也有误差,这时候便需要定位(localization)修复误差。

本文作者和林肯MKZ改装的自动驾驶
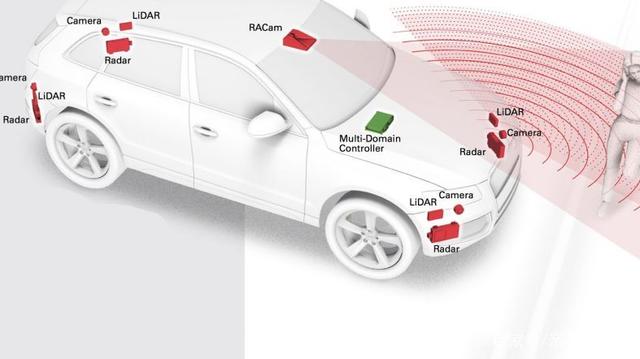
每种技术都有自己的优势和劣势,相辅相成,单独使用时,没有传感器是完全可靠的。
自动驾驶系统,分为感知、决策、规划、控制这几大层次,其中各个层次下又可以继续划分出多个子模块。这样的话,一般无人驾驶软件由3个大的系统构成:
第一,类似司机的眼睛和耳朵。
感知层,比如依靠激光雷达、毫米波雷达以及摄像头。
第二,类似司机的大脑。
判断决策层,获取到信息以后,系统需要去判断,刹车、左转、停车。
第三,类似司机的手脚,
执行层,判断后执行指令。将决策获得信息转化成刹车、油门和转向信号,控制车辆按照预期行驶。
感知可以细分为两种:“传感”和“感知”。“传感”获得的是传感器的原始数据,比如图片,而“感知”是从图片里处理出的有用信息(图里有几个人,几个标志牌,几条车道线)。
虽然随着深度学习的成功,在感知层面使用深度学习算法已经是自动驾驶的“常规动作”,但在决策规划控制的时候,人工智能深度学习算法不能包打天下。
“八大神器”还要分为两类,自车感知和外部感知。摄像头,雷达,GPS等每时每刻获得的信息是自车感知。定位,地图相当于你告诉汽车在哪里。比如坐标北京朝阳区东南三环华威桥上,这是外部感知。
由此可以看出,让自动驾驶眼观六路耳听八方的“八大神器”在为感知层提供数据,这背后还需要强大的计算能力作为支撑,是自动驾驶万里长征才起步,为人类进化到自动驾驶时代做数据储备。(完)












 粤公网安备 44010602004358号
粤公网安备 44010602004358号