最小纵向安全距离的数学模型
我们知道,跟车场景下后车需要和前车保持一定的跟车距离,以防前车突然刹车而出现追尾情况。最小纵向安全距离应该保证后车在恶劣的跟车场景下仍然可以避免追尾事故,恶劣的跟车场景定义如下:
1) 后车正在以最大加速度跟随前车前行;
2) 前车突然采取最大制动加速度进行减速;
3) 后车在反应时间内依然以最大加速度前行,在反应过来后改用最小制动加速度进行减速;
4) 两车停止时,间距为零。
根据速度-位移公式,上述恶劣跟车场景下的最小纵向安全距离应定义为:
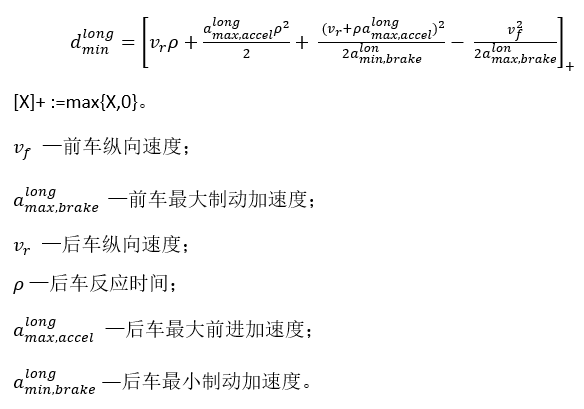
需要强调的是该公式计算的是恶劣场景下的最小安全距离,实际跟车场景下,如果前车的制动加速度和后车反应时间内的加速度不是公式中的最大值,或者后车在反应时间后采取的制动加速度不是公式中的最小值,理论上其最小安全距离的要求是小于公式中的结果的,即本标准中定义的最小安全距离可以满足恶劣场景要求,对于正常跟车场景会更加安全。
从上述公式中可以看到,最小安全纵向距离取决于以下参数:前车最大制动加速度和后车的相关性能参数,后者可以由车辆厂商根据车辆的实际性能决定,但是前车的最大制动加速度如何预测?如果行业内没有一个可以参考的值,后车就无法设定与前车的合理安全距离。显然如果该值越大,后车需要预留的跟车距离就越长,道路的通行能力就越受限,因此行业需要制定出一个参考值,既能保证道路的通行能力,又能兼顾车辆的物理实现能力。
我们通过采集人类自然驾驶数据,筛选出591个危险场景,其中583个为即将发生碰撞,8个为出现了碰撞。前车紧急刹车的有效场景有219个,涵盖了各种路面情况(干燥、潮湿)、天气情况(晴天、多云、下雨)、光照情况(白天、黑夜)以及道路类型(普通道路、高速、环路等)。然后将RSS模型集成到仿真车辆中,在这些场景下进行仿真测试,以获取最佳安全性的参数组合。最终我们确定前车最大制动加速度为6.1时,场景通过率最高,因此我们建议将该值做为行业的参考值,供车辆生产商参照使用。
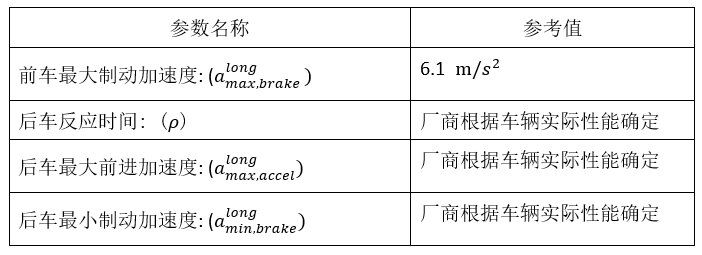
表1 最小纵向安全距离相关参数参考值
从这个例子可以看出,我们将人类对安全距离的认知用数学公式表达了出来,且提供了关键参数供行业参考。该技术独立于车辆的实际参数,在决策模块之外增加通用的安全原则审查,因此它是透明的、可验证的,且技术上是中立的。
决策安全保障标准的制定工作及后续计划
决策安全保障标准于2018年12月正式立项以来,受到业界的广泛关注,共有12家单位参与了该标准的制定工作,包括:英特尔、交通运输部公路科学研究院、深圳市金溢科技股份有限公司、清华大学、威马汽车、北京市交通信息中心、上海蔚来汽车有限公司、华为技术有限公司、同济大学、北京百度网讯科技有限公司、上海智蔚智能科技、中兴技术有限公司。工作组成员历经一年的时间,进行了9轮内部评审后,才提交智能交通产业联盟进行专家审查,最终于2019年12月通过专家评审并发布。在此非常感谢各成员单位的大力支持!
2020年工作组将会在该标准的基础上开展测试规程的开发工作,针对L3及以上车辆的决策安全制定相应的测试规范,从而为自动驾驶车辆的决策安全提供明确的评价标准。该测试标准近日已于C-ITS批准立项,目前处于工作组成员招募阶段,欢迎关注该技术的相关单位加盟,共同推进自动驾驶安全规范建设。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号