为了适应与时俱进的行业需求发展,潜行创新致力于为政府、公共事业机构及企业客户提供性能最强、体验最佳的革命性产品和水下应用解决方案,并已在警用消防救援、水产渔业养殖、港口船体检查、环保市政、水利水务、科考探索等领域得到全球多个国家地区的广泛应用。

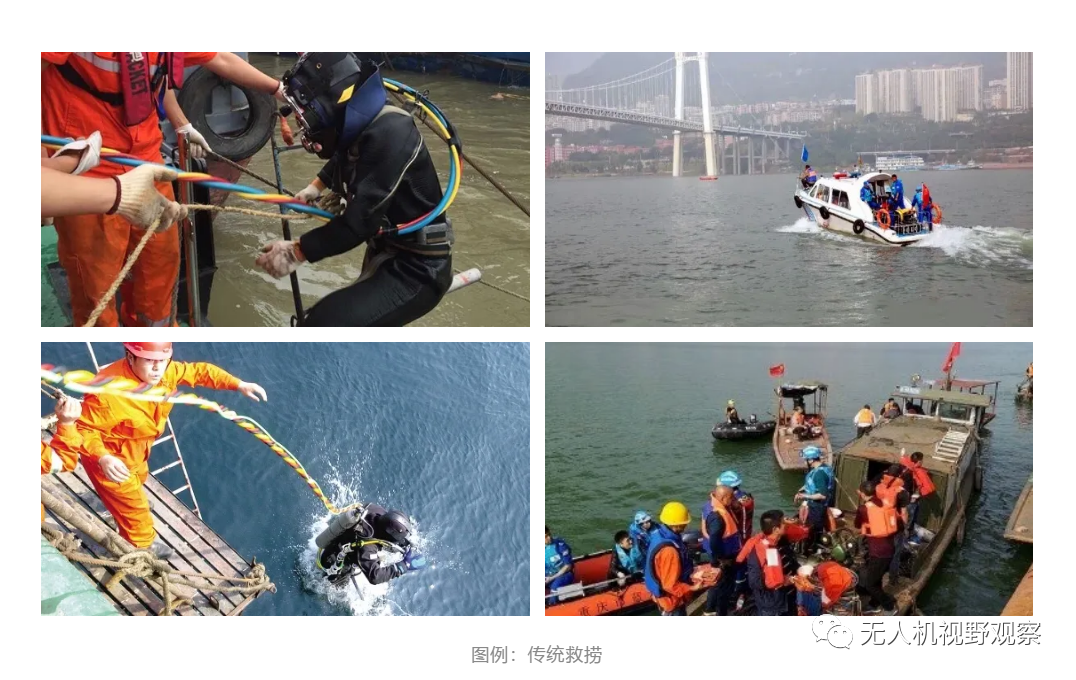
传统救捞
传统水下救捞方式多以蛙人搜寻以及声呐等设备辅助进行,如在搜寻范围较大的水域,会先以声呐成像判断几处目标物疑点,随后定位靠蛙人下水排查确认,直至成功救捞。
传统救捞方式的问题在于效率较低、成本较高,搜寻方式普遍单一,人工下潜有较大的安全隐患(如水流速超过1.2m/s时不宜潜水作业)。
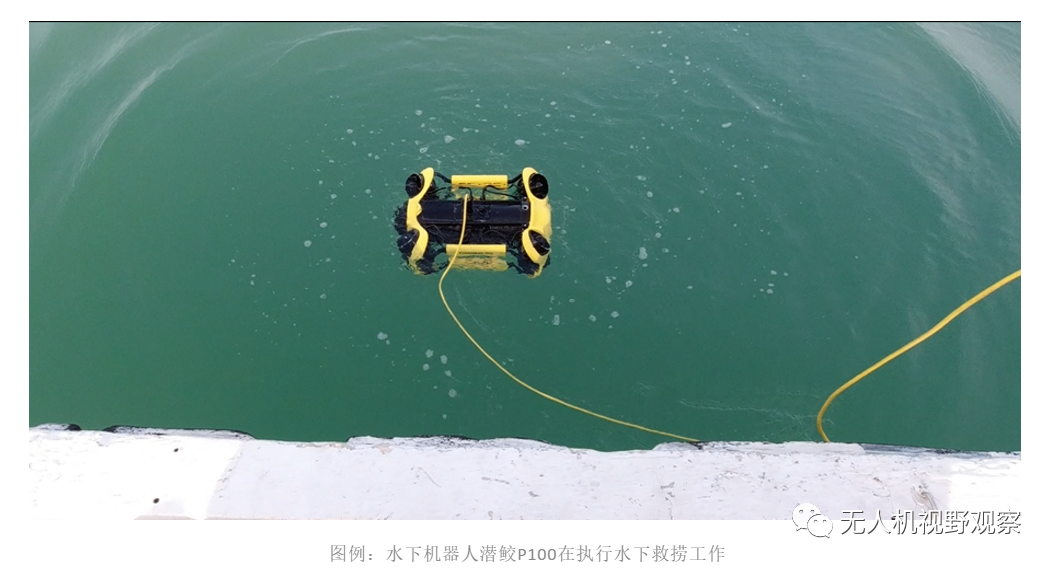
水下机器人救捞
相较于传统救捞方式,水下机器人救捞有如下优势:
安全优势
替代部分人工潜水作业,特别是在搜寻期,在水域条件较差的情况下,机器搜寻免去了人工搜寻的安全隐患。
效率优势
拥有良好配置的水下机器人执行水下作业,可丰富救捞方式,并在某些水域条件下具有比人工更高效安全的优势(如无光环境、水流过急、水深60米超过人体潜水极限等)。
成本优势
传统救捞需潜水员频繁下潜作业,且潜水员作业市场价普通较高,水下机器人参与救捞可替代部分人工下潜作业,降低成本。

案例解析
潜鲛P100寻得失联海床机并成功打捞
案例背景
经客户阐述,福州连江县某近海水域海床机因通信设备故障,导致失联,经过多日搜寻打捞无果,人工下潜搜寻效率低、风险高,亟需水下搜寻设备提高搜救效率,尽快打捞。
救捞现场情况
距离海岸港口:1.5公里~2公里潮汐情况:退潮期海风等级:1~2级洋流情况:受东海、闽浙沿岸流影响,流速在25 cm/s 左右浊度(NT U):>300NT U能见度:0.5米
水深:23~25米
救捞设备
潜鲛P100水下机器人【负责设备搜寻、海底环境确认】
浮标【用于确认目标物起捞位置】
潜水员【负责设备搜寻、安装起捞装置】
案例过程
1、确认救捞目标物形状大小特征以及对目标物周边可能存在的情况了解(周边铺设有电缆以及渔民废弃的网笼、绳索等)

失主提供:失联目标物照片
2、确定搜寻范围:遗失前,通过最后一次的定位记录,确定大概搜寻范围
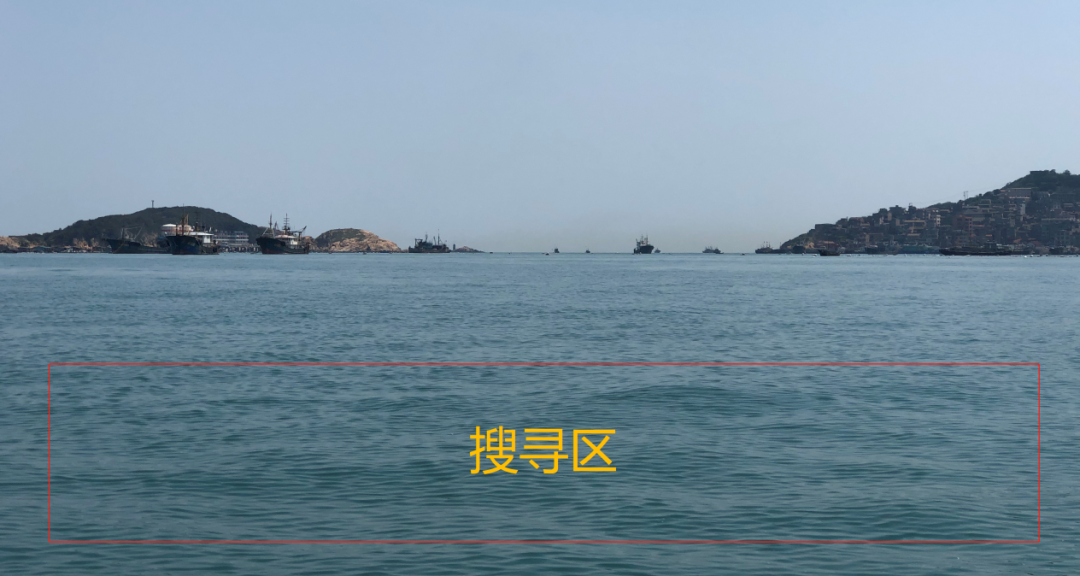
搜寻范围为40米半径水域
本次搜寻的潜鲛P100搭配100米线缆
最高可下潜100米,最大水平半径200米












 粤公网安备 44010602004358号
粤公网安备 44010602004358号