利用 TensorFlow 神经网络模型,四维图新的制图工具能从原始数据中自动识别地图要素,生成高精度地图。
作者|邢逸帆
邮箱|xingyifan@pingwest.com
在自动驾驶中,无人车需要和传统地图大不相同的“高精度地图”。
供司机使用的传统地图,有导航、路径规划、拥堵提示的功能就足够了。但是在驾驶过程中,人脑能轻易完成的联想、识别、判断路况等工作,对于目前的无人车而言却非常困难。因此,供无人车使用的高精度地图就需要具备车道级的引导能力,帮助无人车“上道”。
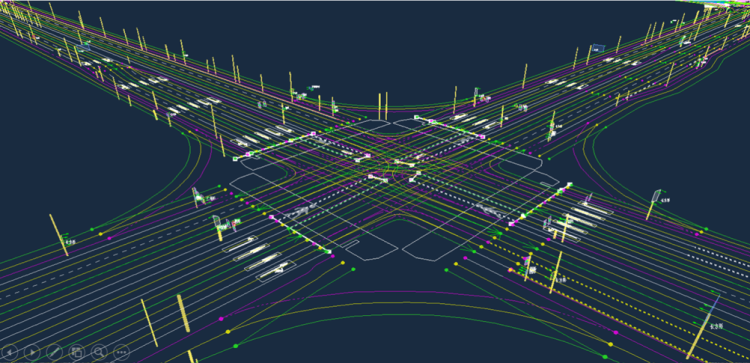
高精度地图不仅需要描述出精细的车道标线、变道参考线以及弯道的起止位置等路面属性要素,还需要尽量完整还原道路现场情况,在三维空间里描述现实世界。一旦地图出现误差,或者更新不及时,就可能直接干扰无人车的行驶安全。
一直以来,为现实中存在的路段绘制高精度地图都是一个耗时耗力的工作,如何利用机器学习框架加速地图绘制,也成了无人驾驶公司角力的重头戏。利用机器学习开源框架 TensorFlow,数字地图提供商四维图新将高精度地图的人工率降低到了 30%,做到了从原始数据中自动识别地图要素,生成地图。
什么是高精度地图?
对于无人车来说,地图的精度越高、信息越丰富,就越容易判断路况,行驶也就越安全。高精度地图的精确主要体现在两个方面。
第一,绝对精度高。
普通导航电子地图一般绝对精度在 5-10 米,只要起到辅助驾驶员的作用就足够了,但对于无人车来说,精确度就是生命线,两个车道间的距离也不过几十厘米。因此,高精度地图的绝对精度需要控制在 20 厘米以内,也就是一个车道标线的宽度,这样才能保证不会发生侧面碰撞。
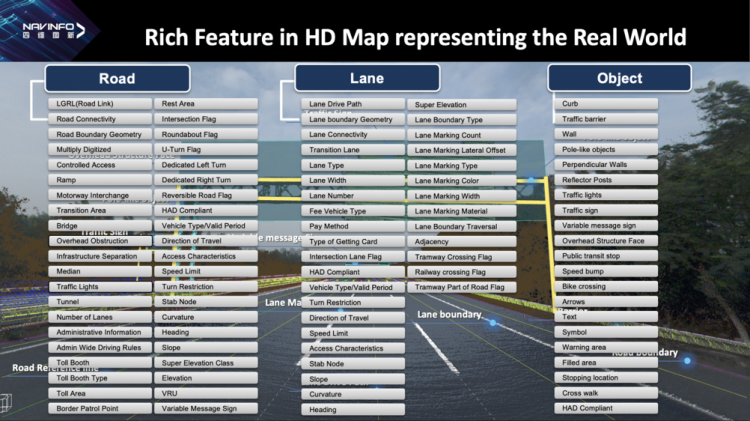
第二,路面属性要素更丰富,更细致。
在传统地图中,道路经常被抽象成宽度无差别的线,然而高精度地图不仅要有准确的定位坐标,还需要采集包括车道边界、交通标牌、护栏、路灯杆、龙门架在内的 100 多种路面属性要素,甚至每一条路路边马路牙的材质和宽窄,都要精确记录在地图中。当无人车上路时,高精度地图的每一个属性都关乎自动驾驶的安全:哪些路段周边有防护栏,哪些障碍物的材质偏软安全系数较高,都是行驶中做出判断的重要依据。
除了更精确以外,高精度地图的鲜度也更高。
自动驾驶车辆需要实时掌握车辆周边设施的变化情况和道路的交通状态,因此,高精度地图需要提供日更新、甚至小时级更新的高鲜度数据和以分钟、秒为更新频率的动态交通信息。四维图新运用 TensorFlow 检测分割原始数据,大幅提高了地图数据生产的自动化率,保证了地图数据的鲜度。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号