用 TensorFlow 自动制图
高精度地图的底图制作主要分为原始数据采集和地图要素提取两个步骤。
传统地图主要通过轻量级设备,采集车辆 GNSS 行驶轨迹数据,以及周边地物的 POI 点数据,而高精度地图需要更专业的采集车。四维图新的数据采集车上集成了激光雷达、惯性导航系统(INS)、全景相机、GNSS、差分基站等多种测绘工具,以绘制详细的车道级地面信息和道路周边详细的道路设施为主。

专业采集设备采集到的海量原始数据经过自动化解算后,TensorFlow 担纲的算法会自动从中提取出地图要素。
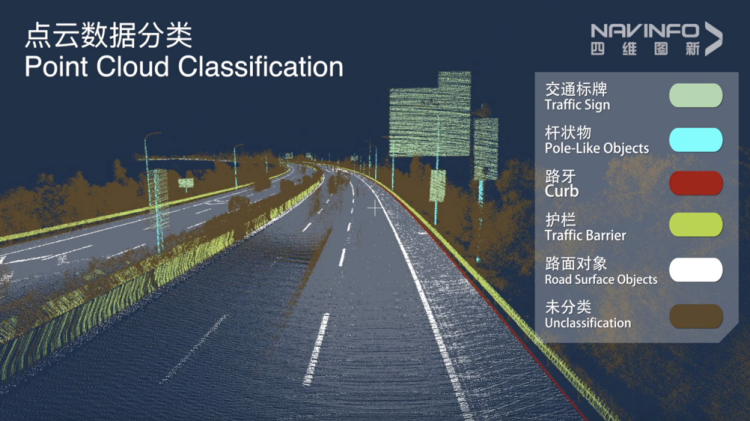
在 AI 算法开发过程中,四维图新使用 TensorFlow 训练图像(对象检测、分割)以及点云识别算法,对点云自动进行要素分类。
确定有价值的要素点云后,算法会滤除对后续提取有干扰的噪点,自动裁切作业范围外的无效点云。

滤除噪点后,算法通过点云分类结果和点云的强度值自动跟踪提取车道标线、路面标志、交通标志、护栏、路牙、杆状物、上方障碍物等路面、路侧、路上的交通设施和对自动驾驶有影响的附着物。提取的矢量数据根据识别结果自动赋属性值,和相邻的其他要素组织逻辑关系,车道之间的位置关系进行准确的定位和和规划,实现车道级别的规划。
在算法训练过程中,TensorFlow 支持大规模分布式模型训练,可以充分发挥硬件资源的集群优势。更多的硬件意味着更大的批次,进一步也决定了更快的训练效率和更好的算法效果。
四维图新地图研发工程师郭兆钟告诉 PingWest品玩,使用 TensorFlow 后,同样规模的训练,训练时间缩短了40%。“在相同训练周期的情况下,算法模型的效果也有相当程度的提高。”郭兆钟说。
在 TensorFlow 的帮助下,目前四维图新已经完成了全国高速,包括城市快速路的测绘工作,总地图里程达到 30 万公里以上。同时,四维图新高精度地图生产已经达到 40% 自动化率,30% 半自动化率,这一数据领先全行业。
目前,我们仍在征集更多杰出的TensorFlow应用案例,你可以点击“阅读原文”提交案例参与我们的报道!












 粤公网安备 44010602004358号
粤公网安备 44010602004358号