1961年,李奥贝纳广告公司的Tom Rogers创造了金枪鱼Charlie,这是一个会说话,跳摇摆舞的卡通吉祥物,也是StarKist品牌的代言人。这项广受欢迎的广告持续了几十年,它的流行语“对不起,Charlie”很快就被收录到了美国词典中。

当中情局高级技术和项目办公室在20世纪90年代开始进行一些以鱼类为中心的研究时,Charlie似乎是个完美的代号。中情局的Charlie除了是条鲶鱼外,它还是个机器人。

更确切地说,Charlie是一个秘密收集水样的无人水下航行器(UUV)。它的操控者通过一个视距无线电遥控器实现控制。关于这条鱼的构造,除了它的身体包含了一个耐压壳、压载系统和通讯系统,它的尾部容纳了推进装置之外,还没有透露太多。只有61厘米长,Charlie创造不了任何大鱼记录。(有些种类的鲶鱼可以长到2米)Charlie是否有任何有用的情报不得而知,因为它的任务细节仍然是保密的。
探索水下环境,没有什么可以比得上机器人
中情局并不是唯一一个不懈研究UUV的机构,也不是第一个这样做的机构。在美国,这类研究始于20世纪50年代,美国海军为深海救援和打捞行动的技术提供了资金支持。其他项目着眼于海上无人机进行监视和科学数据收集。
在华盛顿大学应用物理实验室从事无人飞行器研究的首席电气和计算机工程师Aaron Marburg指出,世界海洋基本上禁止载人船只进入。“海洋的本质是我们只能带着机器人去那里。”他在最近的一次电话采访中告诉我。为了探索那些未知的领域,他说:“我们被迫解决技术问题,让机器人工作。”

这是一幅为了纪念由华盛顿大学应用物理实验室建造的一系列水下研究机器人SPURV的油画。在近400次部署中,没有SPURV丢失。
最早的无人潜航器之一恰好位于马尔堡办公室外的大厅里:自走式水下研究小车,简称SPURV,是从50年代末开始在应用物理实验室研制的。SPURV的最初目的是收集有关海洋物理性质的数据,特别是温度和声速。与Charlie不同的是,SPURV有着鱼腥味十足的外表,它的鱼雷外形更符合它的使命。它只有3米多长,可以潜到3600米,最高时速2.5米/秒,用电池组工作5.5小时。数据被记录到磁带上,然后传输到感光纸带记录器或其他计算机兼容的介质上,然后用IBM1130绘图。
随着时间的推移,SPURV的仪器越来越强大,项目范围也在扩大。例如,在一项研究中,SPURV携带了一个荧光计来测量染料在水中的分散度,以支持尾流研究。该项目非常成功,开发出了更多的SPURV,最终在1979年结束时完成了近400次任务。
Marburg说,研究水下机器人意味着要平衡技术风险和任务目标与资金和其他资源的限制。对这一领域纯粹的推测性研究的支持很少。因此,目标是构建简单、有效和可靠的UUV。Marburg说:“没有人愿意给他们的资助者写一份报告,说‘对不起,电池没电了,我们的百万美元机器鱼在水流中丢失了。’”
一个名叫SoFi的机器鱼
自SPURV以来,在美国和其他地方已经有许多其他的无人水下航行器,形状和大小各异,用于各种任务。无人潜航器及其“自主近亲”——水下机器人现在通常用于科学研究、教育和监视。
这些机器人中至少有几个是受鱼启发的。例如,在20世纪90年代中期,麻省理工学院的工程师研制了一种机器人,也叫Charlie。它松散地模仿了一条蓝鳍金枪鱼,它的推进系统模仿了一条真正的鱼的尾鳍。这是一个很大的偏离螺丝或螺旋桨上使用的无人侦察机,如SPURV。但是这个Charlie从不自己游泳,它总是被拴在一堆工具上。麻省理工学院的下一项研究是一种名叫Wanda的机器人,它克服了这个限制,可以自由地游泳,但还没学会避免撞到实验室水箱的侧面。

快进25年,麻省理工学院计算机科学和人工智能实验室的一个团队推出了SoFi,这是一个明显更像鱼类的机器人,它可以在真实的鱼旁边游动而不会打扰它们。由改装的超级任天堂手柄控制,SoFi可以潜入水下超过15米,控制自己的浮力,并在电池充电前游动长达40分钟。IEEE Spectrum的Evan Ackerman指出,SoFi的创造者们在斐济附近美丽的海域测试了他们的机器鱼。
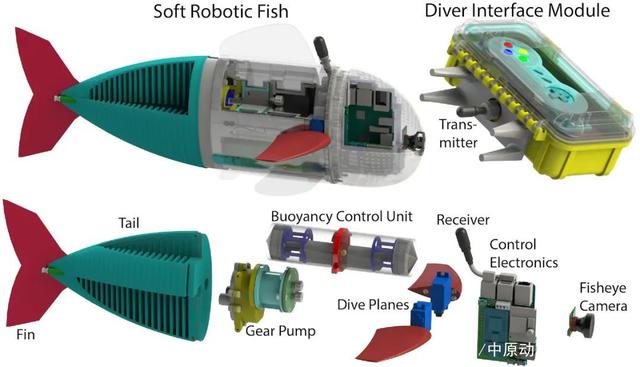
SoFi的设计目的是对生活在水下的所有迷人可爱的动物进行近距离、最小程度的破坏性观察。麻省理工学院的机器人专家们非常小心地使SoFi在大小和行为上尽可能与真鱼相似,但他们也必须使其完全独立。实用的SoFi不仅仅是一个仿生机器鱼设计的概念证明,它是一个真正的研究工具,具有友好的控制系统和实用的电池寿命。SoFi由潜水员使用防水游戏控制器操控,该控制器通过超声波与机器人进行通信,机器鱼能够将高级定向命令转换为它可以执行的3D轨迹。
SoFi、Wanda和Charlies都是仿生学的例子,这一术语产生于1974年,用来描述生物机制、过程、结构和物质的研究。仿生学从自然中寻找设计灵感。
有时,这项技术被证明比天然技术更有效,正如英国埃塞克斯大学博士Richard James Clapham在研究机器鱼时发现的那样。在机器人专家Huosheng Hu的指导下,Clapham研究了鲤鱼的游泳运动。然后,他开发了四个机器人,包括像鲤鱼一样游泳的机器人,其中最有能力的是iSplash II。当在理想状态下进行试验时,即在一个5米长、2米宽、1.5米深的水箱中,iSplash II最大速度为每秒11.6体长(或约3.7米/秒)。这比一条真正的鲤鱼要快,它的最高速度是每秒10个体长。但是iSplash II没有达到鱼类快速躲避捕食者的最佳表现。
当然,在试验池或平静的湖中游泳是一回事;在汹涌的海浪中幸存下来则是另一回事。机器人学家Kathryn Daltorio对后者进行了深入的探索。
凯斯西储大学助理教授、仿生机器人研究中心联合主任Daltorio研究了蟑螂、蚯蚓和螃蟹的运动,为如何制造更好的机器人提供了线索。在观看了一只螃蟹从沙滩爬行到浅水区而没有被海浪冲出航道后,她受到启发,设计了一种两栖机器人,它的脚呈锥形,弯曲,可以在沙滩上挖掘。这种设计使她的机器人能够承受高达其体重138%的力。

凯斯西储大学的Kathryn Daltorio创造的这只机器蟹模仿了真实的螃蟹如何抓住沙子以避免被海浪打翻。
在这个的设计中,Daltorio遵循了建筑师Louis Sullivan的著名格言:形式遵循功能。她并不是在模仿大自然的美感,她的机器人只不过和螃蟹有几分相似,而是有着最好的功能。她着眼于动物如何与环境互动,并利用了进化论的最佳理念。
然而Daltorio承认,看起来很逼真的机器鱼也有一席之地,因为它们能捕捉想象力,激发人们对机器人技术和自然的兴趣。与超现实的人形生物不同,机器鱼不太可能让人掉入毛骨悚然的神秘谷效应中。
在写这篇专栏文章时,我很高兴看到最近有很多这样的机器鱼的例子。三菱重工的子公司Ryomei Engineering已经开发了几种:机器人腔棘鱼、机器人金锦鲤和机器人鲤鱼。腔棘鱼被设计成一种用于水族馆的教育工具,用来展示鲜见鱼类的逼真标本,这种鱼类通常只在化石中才能见到。与此同时,日本北九州大学的工程师们创造了一种外形可信的海鲷。
不管它们的官方目的是什么,这些受自然启发的机器人特征也能反过来启发我们。无人潜航器在世界海洋上开辟了新的、奇妙的前景,可以扩展人类的探索能力。我们创造了它们,它们增强了我们,这让我觉得是一种非常公平和有价值的交换。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号