桔妹导读:实现自动驾驶是一个复杂的系统工程,需要精准感知环境,理解交通参与者的意图并能够在广泛丰富的场景下,实现稳定安全的无人驾驶。需要面对真实路况中的大量 “不确定性”。这种不确定性是贯穿上下游的,并且感知局限性、行为预测偶然性、规控交互性共同交织的挑战。在不确定性挑战中的规控相应需要满足稳定性和可扩展性的双重特性,但这两个特性存在冲突,且基于单一特性发展的系统会存在技术弊端。本文将探讨规控模块如何去攻克和突破:通过收集海量的数据信息,并使用数据驱动的方法论来驱动技术的迭代。重点从数据驱动的问题分析,算法开发迭代、系统性验证这三个层面切入探讨。
1.真实驾驶环境中多重“不确定性”的挑战
自动化技术,特别是地面轮式机器人技术已经被广泛应用在各种无人低速场景,诸如仓库货运(无人,低速,环境完全可控 ,月球车/火星车(无人,低速,环境不可控但以静态为主) ,快递最后一公里送货(无人,低速,环境不可控)。但自动驾驶技术则要应用在“有人(乘客),高速,环境不可控”等条件更加严苛的场景, 这种环境的驾驶行为预测充斥着诸多“不确定性”,而这个“不确定性”是贯穿感知-预测-规控上下游的。
▍1.感知局限性
车载硬件的感知能力是有局限的,Lidar的可靠感知范围不过百米,货车等大型交通参与者也会造成视角遮挡等问题;
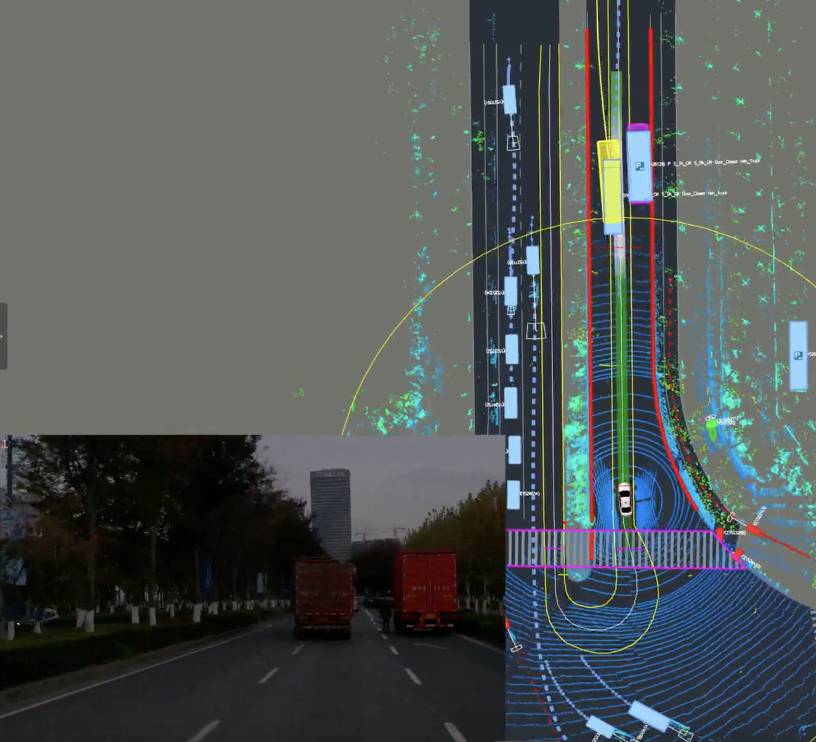
▍2.行为预测偶然性
交通参与者的很多行为具有很高的偶然性,比如对于突然跳出的动物、异动的行人、车辆等;

面对突然冲出来的小动物,虽然能够识别出来是动物,但也不能明确动作其下一步动作。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号