机器人项目一直都是黑客的最爱。几乎能够字面上将项目付诸实践,这会唤起一种特殊的喜悦,真正驱动我们最狂野的想象。我们认为这是当今市场上充斥着的交互式技术繁荣的灵感之一。Technovation公司也有同样的想法,所以决定制造一个完全铰接的两足机器人。
图片来源于网络
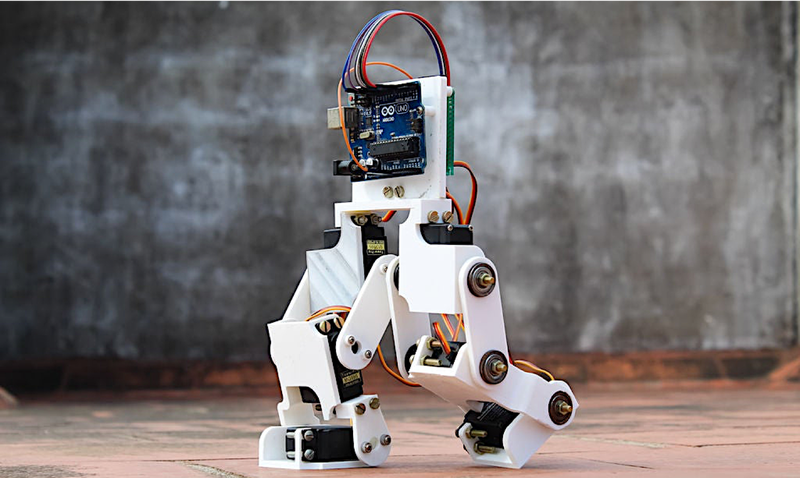
两足机器人的两条腿是模仿人腿的关节,在脚、膝盖和臀部都有枢轴点。为了控制机器人的运动,Technovation使用了逆运动学(一种计算连接运动的方法,而不是显式编程)。用户输入每只脚的末端坐标,而不是每个单独的关节角度,一个特殊的函数输出到达每个末端坐标所需的关节角。该软件的这一部分得到了极高的评价,值得您花时间去研究。
如果你想改变机器人的高度或步幅长度,Technovation在固件中提供了一些全局常量,这些常量将自动调整计算以适应新机器人的尺寸。在此项目的各个方面中,给我们印象最深的是详细的报告。该机器人是在Fusion 360中设计的,其部件采用3D打印技术,从而为下一个黑客提供了最大的设计灵活性。
也许Technovation两足机器人将有助于重振社交机器人的热潮。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号