杨胜兵教授围绕“无人驾驶政策分析”、“无人驾驶小车应用环境及市场现状”、“无人驾驶系统顶层设计”、“无人驾驶小车驾驶域控制架构分析”、“无人驾驶小车AI算法训练过程、部署及评价关键指标”五个部分对于无人驾驶小车驾驶领域控制器现状及发展趋势展开讲述。
本文来源:焉知自动驾驶
分享围绕“无人驾驶政策分析”、“无人驾驶小车应用环境及市场现状”、“无人驾驶系统顶层设计”、“无人驾驶小车驾驶域控制架构分析”、“无人驾驶小车AI算法训练过程、部署及评价关键指标”五个部分展开。


直播初期,杨胜兵老师从国家政策、技术发展、用户习惯等多方面介绍了智能汽车的技术发展。其中,突出介绍了5G技术的推广及应用,智能汽车算力的飞速成长。

随后,杨胜兵老师介绍了无人驾驶小车的应用环境及市场现状。从工业应用,如物流、零售、公共交通、共享出行;教学应用,如智能车教学、比赛两方面,结合大量实际案例进行了相关介绍。

杨胜兵老师表示,无人物流是我国落地案例较多且民众接受度较高的应用场景。众所周知,因疫情的影响,无人物流这种方便快捷的应用方式得到了社会各界的关注,在商业应用层面也得到了较好的推进。


教学应用方面,杨胜兵老师以当前备受业内看好的北理慧动教育为案例,详细讲解了教学联合体所能发挥的人才培养功能,并以其提供的各教学平台为切入点,介绍了当前我国无人驾驶领域人才培养的现状及发展。


在系统设计板块,杨胜兵老师先介绍了SAE的自动驾驶分级标准,随后对国内外的相关分级进行了比较,介绍了我国当前自动驾驶发展的情况。

杨胜兵老师介绍到,智能汽车平台由平台化公司、算法公司、硬件公司、传统汽车制造公司组成,每个环节都密切相关,想要实现高级别的自动驾驶需要全产业链的支持。

杨胜兵老师以EPS系统为例,讲解了传统标定的方法,及当前使用较多的在线标定方法。传统标定是系统将数据保存在DATA存储空间内,随后Tbox通过CAN网络收发DATA存储空间内的数据,并与云控制平台通过4G/5G信号通信,完成在线标定。而在线标定,则是系统将数据保存在DATA存储空间内,随后Tbox通过CAN网络收发DATA存储空间内的数据,并与云控制平台通过4G/5G信号通信,完成在线标定。


对于无人驾驶汽车的控制框架,杨胜兵老师表示当前无人驾驶汽车领域的硬件框架大致分为三种,一种是CPU+GPU;一种是CPU+FPGA;一种是多核CPU,也就是CPU1+CPU2+CPU3.....
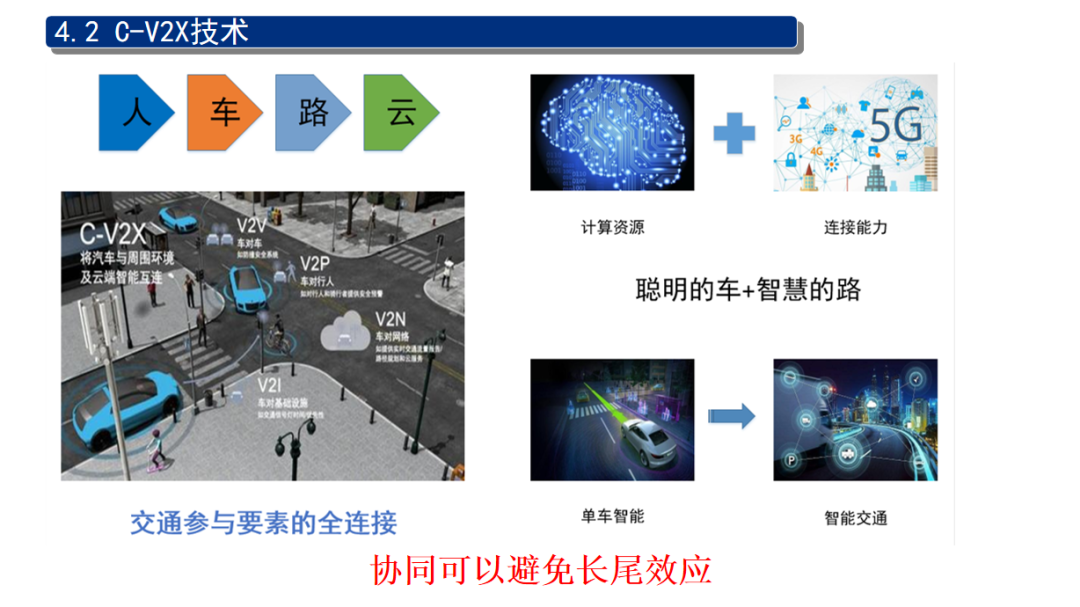
杨胜兵老师介绍到当前很多城市都在开展智慧城市建设的相关项目,这就必然离不开V2X技术。随后,杨胜兵老师围绕V2X的技术框架展开了详细介绍。
杨胜兵老师指出,“损值函数LOSS”、“精确度”、“运行时间”、“储存器的运算能力”、“储存空间”是当前无人驾驶小车AI算法训练评价的关键指标。AI算法训练是为了达成具体应用场景下的使用功能,如前防碰撞预警、驾驶员疲劳检测、车道线识别等。

杨胜兵老师强调感知模块在无人驾驶汽车整体技术框架中有着至关重要的作用,并以百度Apollo为例,进行了详细的介绍。
直播最后,杨胜兵老师表示,他所在的团队当前正在招募实习生,欢迎有潜力且希望进入自动驾驶领域的同学们积极报名,给自己一个和前端企业接触的机会。
以下为完整PPT












 粤公网安备 44010602004358号
粤公网安备 44010602004358号