背景介绍
■ 刚性机器人存在许多局限性
■ 刚性机器人笨重且昂贵
■ 软体机器人可以通过简单的设计和控制产生复杂的运动方式,并且能够 很好的适应不同的应用环境
■ 目前阶段对软体机器人的研究较少,软体机器人有很大的发展潜力
软体机器人的构成
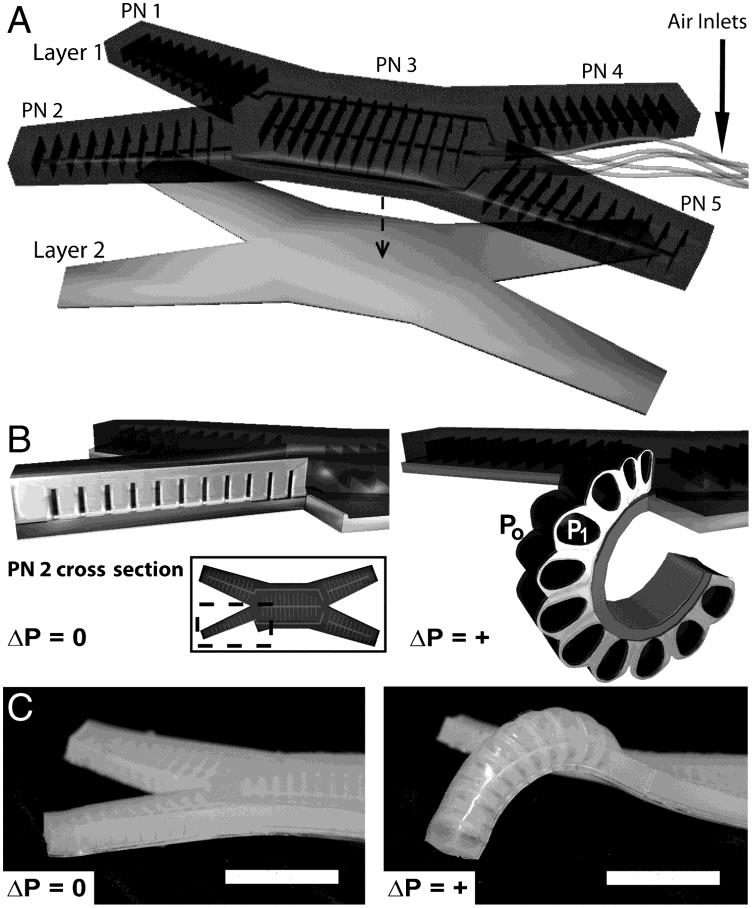
制造的软体机器人由上下两层构成
■ Layer1为Ecoflex(Ecoflex 00-30或Ecoflex 00-50; Smooth-On Inc.)制成的驱动层,它在低应力下具有高度可伸长性
■ Layer2为聚二甲基硅氧烷(PDMS)(Sylgard 184, Dow Corning)制成的应变限制层,因为它在压力增加时产生的应力相对不可扩展
在Layer1中存在通过软光刻制造的腔室
■ 腔室在气体压力作用下膨胀。可伸展顶层和不可伸展底层之间的应变差异导致PN在加压时弯曲。我们通过其腔室的方向,尺寸和数量调整了PN的弯曲运动
软体机器人的运动原理
软体机器人的运动
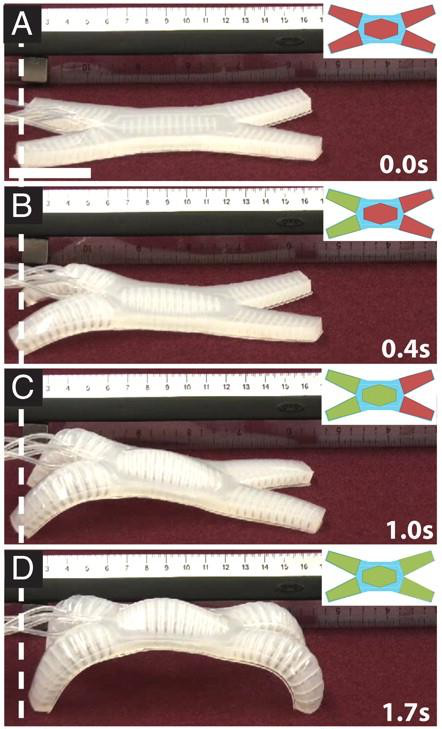
软体机器人的第一种运动步态—蠕动(起伏)
■ 通过依次加压PN来控制机器人运动
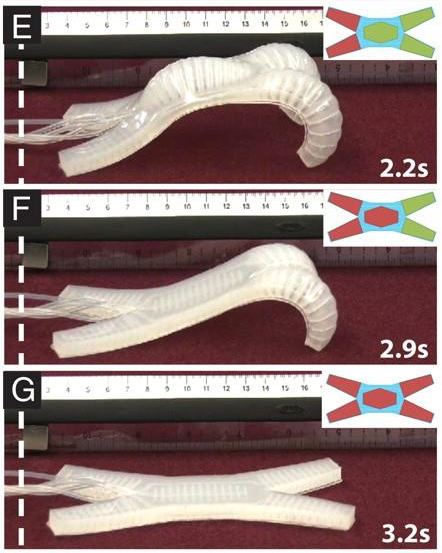
■ 蠕动涉及三个步骤,从静止状态到PN 1的加压和PN 2, 这个动作使机器人不能向后滑动。PN 3的加压使其脊柱从表面抬起。PN 4和5的加压,PN 1和2的顺序减压,然后PN 3用两个前肢拉动机器人向前
■ 此时,后三分之二的机器人与表面摩擦接触; 此各向异性在前面和后半部之间的摩擦接触导致向前运动时,我们减压的PN 4和5。在这个步态中,软体机器人的速度为13±0.6m/h(约93体长/小时;体长/周期的11%)
软体机器人的第一种运动步态












 粤公网安备 44010602004358号
粤公网安备 44010602004358号