具有机器视觉的工业机器人就像拥有了人的眼睛,变得智能化,比传统工业机器更加灵活、安全,能够适应更多复杂的生产制造场景,满足更多个性化需求。勃肯特机器人可以依据客户多样化需求,设计相应的解决方案。
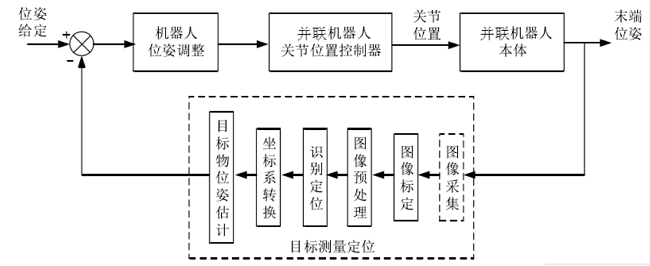
图1 视觉系统控制
一、系统标定
1.1 视觉系统的标定
建立像素和目标尺寸间的对应关系,换算出目标物的位置和大小。采用基于形状匹配的像素当量标定方法,避免了对相机参数的复杂求取且精度满足系统要求。
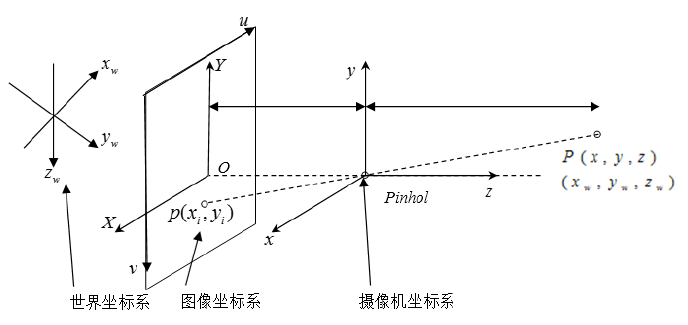
图2 相机成像模型
对图像预处理(包括分割、去噪等),创建感兴趣区域(ROI),然后建立匹配模板并创建圆模板的特征,匹配模板的获取通过边缘检测的方法,最后对两个圆进行匹配,找到匹配度最高的区域进行定位并算出该区域的重心坐标,从而求出像素当量。
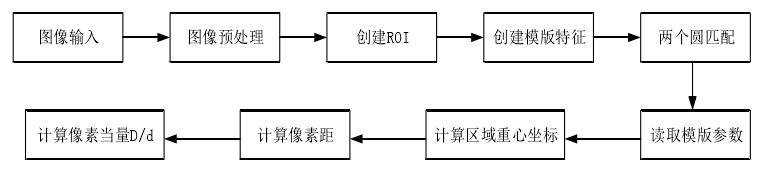
图3 形状匹配流程图
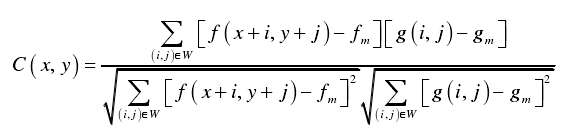
采用相似度的计算方法来形容模板与图像的相似程度:
1.2 视觉系统、传送带以及机器人之间的标定
为确保系统的抓取精度,需要对视觉系统、传送带以及机器人之间进行位置标定。
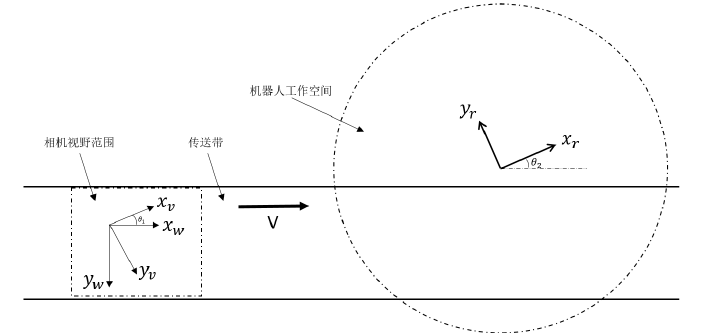
图4 机器人生产线及视觉系统位置关系
二、目标物体的识别
2.1 图像预处理
(1)图像增强
采用傅里叶变换将数字图像处理从空域转化到频域,然后通过傅里叶反变换转换回空域时而信息不丢失,达到图像增强的效果。

图5 图像频率域增强模型
(2)滤波去噪
采用高斯滤波方法进行图像去噪,保护目标边缘信息。
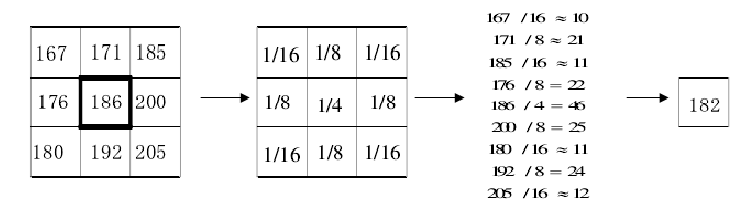
图6 高斯滤波实现原理
(3)目标识别定位
采用特征匹配法对目标进行识别,选用目标的形心位置作为其实际位置传送到机械臂的运动控制系统中,从而引导机械臂执行末端吸盘进行抓取。
三、智能抓取系统的策略分析
依据抓取的运动总路程最短,规划机器人抓取在传送带上的物料的先后排序顺序。采用勃肯特自主研发的统筹分配算法,确定抓取物料以及摆放物料的顺序。
图7 多机器人协作抓取与有序摆放

图8 机器人末端 PTP 路径规划












 粤公网安备 44010602004358号
粤公网安备 44010602004358号