Delta机器人已广泛应用在电子、医药、食品等工业自动化生产或包装流水线的分拣、抓放、包装等操作。此外,在工业生产过程中,鉴于柔性生产的需求,要求机器人对外部环境变化具有较强的适应能力,需要为工业机器人安装视觉传感器。勃肯特根据自身并联机器人产品优势,结合实际并联机器人应用场景,自主研发了并联机器人传送带视觉追踪系统,实现传送带上散落物料的快速识别和抓放,该系统主要包括以下功能:
1. 图像处理模块:
考虑到由于光电转换过程中 CCD 芯片灵敏度的不均匀性,数字化过程中的量化噪声,传输过程中的误差以及照明光线等因素,图像会存在噪点,为准确获得图像特征,勃肯特技术团队采用特定算法完成图像的预处理。

图1 图像预处理流程
针对快速抓取生产线而言,背景比较均匀,对计算速度要求比较高,因此在经过图像预处理后,只提取图像中周长、面积、圆形度、矩形度等特征参数。
目标面积:
目标圆形度:
2. 模板匹配模块:
(1)考虑到轮廓特征是一种在无纹理背景中可被稳定识别的特征,具有对环境光变化不明显等优势。因此采用基于轮廓特征的匹配方法定位识别目标物体。当与模板图像匹配成功时,软件界面会显示OK状态,当匹配失败时,显示NG状态。
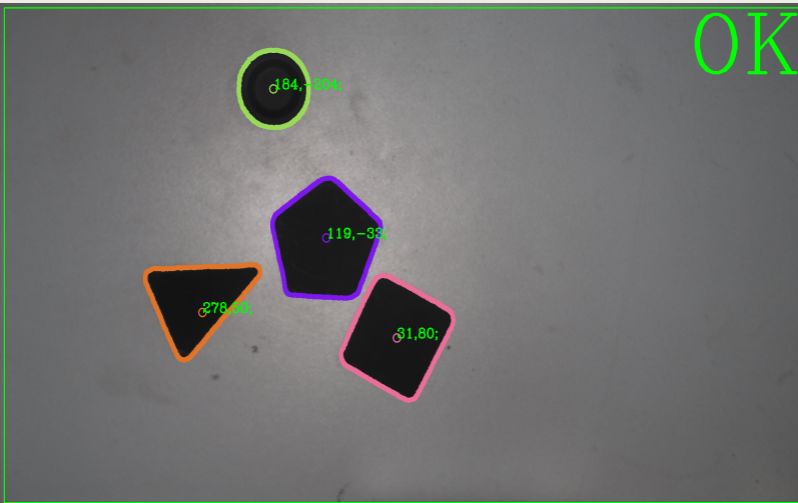
图2 目标物体特征识别
3. 位姿获取模块:
在模板匹配成功后,采用特定的算法获取图像中目标物体的轮廓质心坐标,考虑到不同形状的物体,结合极坐标表达方式在角度计算上的优势,采用基于图像边界极坐标化离散序列的角度匹配算法确定目标物体的方向角度。
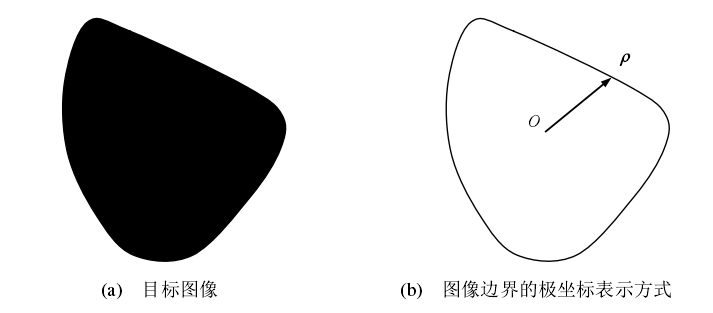
图3 目标边界的极坐标表达
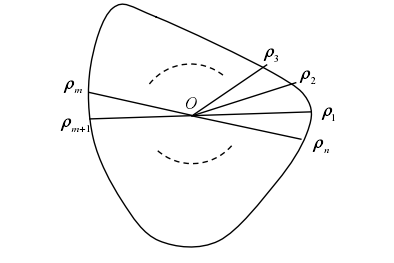
图4 图像边界的等角度离散
4. 视觉追踪模块:
在传送带视觉追踪方面,由于目标物体随传送带一起运动,所以需要对目标物体进行动态跟踪,并保证目标识别不重复、不遗漏,以便机器人能够准确完成目标抓取操作。
采用基于像素当量剔除重复目标点的方法,在高速运行的传送带上获得上面每个不重复目标点的位置信息。
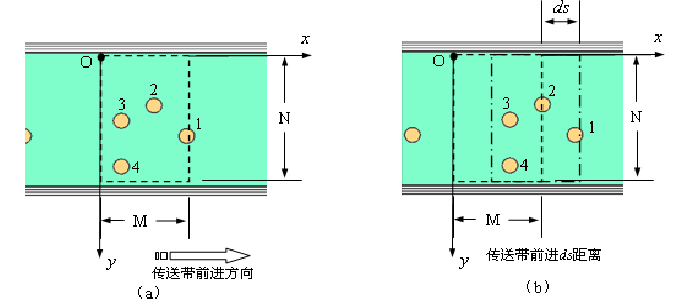
图5 传送带追踪示意图
Delta机器人传送带视觉追踪系统涵盖摄像机标定、图像处理、特征提取、机器人运动学、动力学、控制理论等。勃肯特将机器视觉与并联机器人组成能够以很高的速度完成诸如包装、分拣等抓放操作任务,在实际应用中可以提高企业的竞争力与企业的生产效率。工件高速识别分选技术的广泛应用对工业生产中的很多领域都有着非常重要的实际应用意义。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号