小车在约1 s时间内,向右移动了206个像素点,向下方偏移了32个像素点。换算成距离约向前移动了34.9788 mm,偏移5.4336 mm。
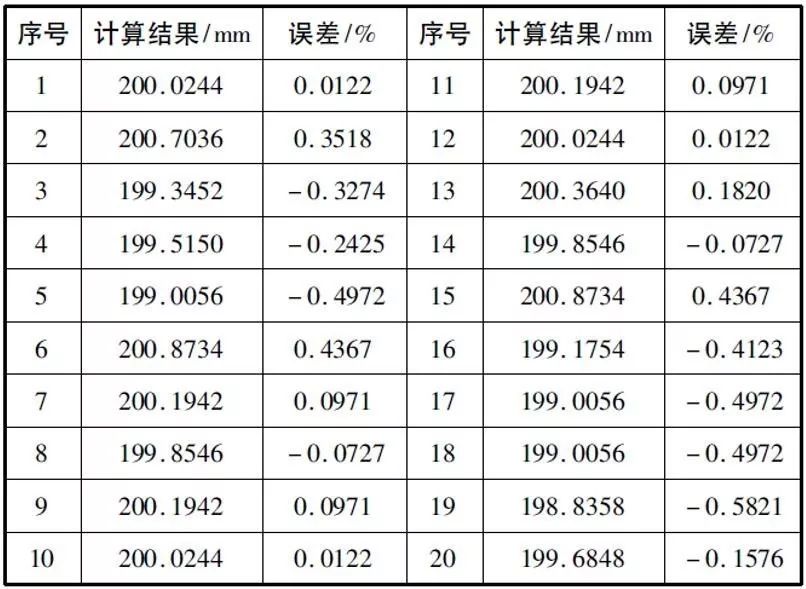
使用基恩士激光位移传感器(型号LK-G150,精度0.01 um)测量小车,将小车移动200 mm的距离,重复试验30次。CCD摄像头拍下的图像,用基于块匹配算法,实际计算结果如表1所示。
表1 小车直线行驶200mm时算法误差
3.3 小车转弯2帧对比结果
以左转弯为例,图12为小车左转弯时,2帧图像基于块扫描的匹配结果。
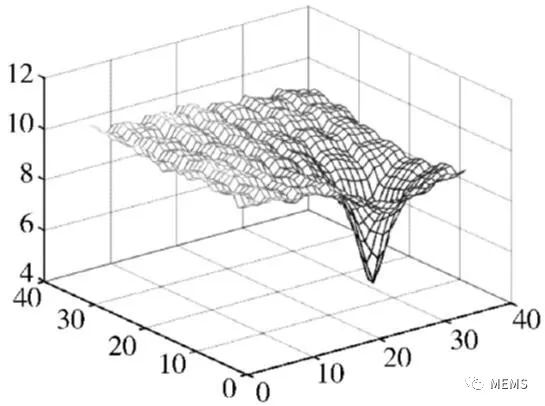
图12 小车左转弯2帧图像块扫描结果
表2 小车左转弯时的转角计算误差
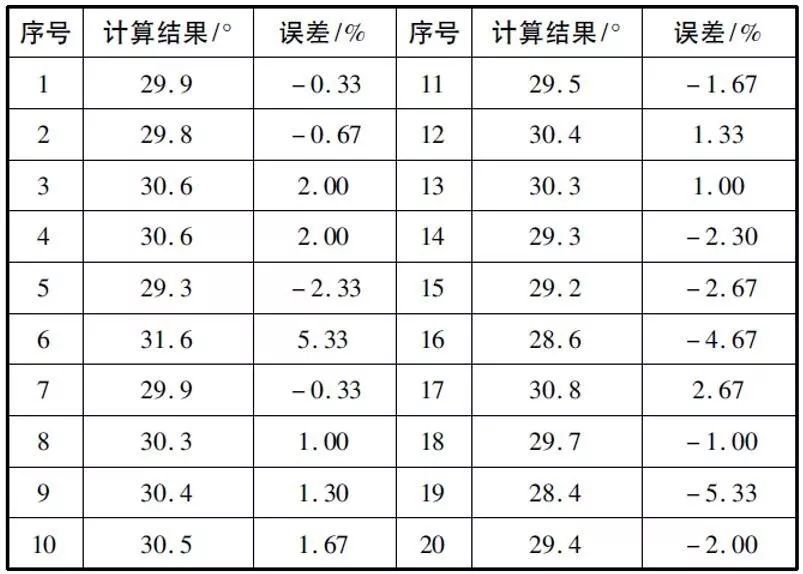
使用精度为0.05°的陀螺仪芯片,使小车向左转弯30°,CCD摄像头拍下图像,用基于块匹配算法,四舍五入精度到小数点后一位。实际计算结果如表2所示。
经计算,计算值与实际值存在一定误差,直线行驶,计算值的误差率比较低,转弯行驶误差比较高,分析其原因如下:
1)直线行驶。
①实际移动不完全是像素点的整数倍,而算法中没有考虑不是完整像素的情况。
②实际CCD摄像头安装位置和镜头角度导致摄像头可照射范围不是整数倍,本身镜头覆盖面有一定误差。
2)转弯行驶。
①由于转弯行驶是按照极坐标系来计算的,而像素点本身是直角坐标系,在相互转换计算中,会有一定误差。
②由于转弯时会考虑转动瞬息的移动情况,在算法消除瞬心移动时,也会造成一定误差。
所以整体转弯行驶的算法的误差会比直线行驶误差要大。
4 结束语
本文介绍了使用CCD摄像头,根据地面图像,配合本文提出的算法,可以用于平整地面AGV的轨迹计算。其优点是与全局摄像头相比成本低,精度高。
与传统方法相比,无需在地面铺设大量标志线,适用范围广,AGV行驶更加自由。但本算法在长期运行时,其误差的累积还是比较大。为此笔者将对以下几种解决方法进行研究:
1)选取像素更低、曝光时间更短的CCD摄像头来提高精度。
2)选择2个或者3个CCD摄像头,采用数据融合技术来降低误差。
3)在地面铺设少许RFID标签,在导航路径规划时,行驶一定距离时,导航到RFID标签范围内,对其累积误差进行校正。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号