2017年全国共发生生产安全事故5.3万起,导致3.8万人死亡,全国安全生产形势依然严峻复杂。2015 年8 月12 日,天津港特别重大火灾爆炸事故因为失火之后在不明情况的情形下进行救援而引发爆炸,导致165人遇难,8人失踪。若能使用救援机器人代替救援人员进入灾难现场进行救援,对于避免或减少救援人员伤亡,提高救援效率具有十分重要的意义。
机器人是当代高端智能装备和高新技术的突出代表,是衡量一个国家制造业水平和核心竞争力的重要标志。
中国机器人产业高速发展
自1954年世界上第一台机器人诞生以来,世界工业发达国家已经建立起完善的工业机器人产业体系。我国机器人研发起步于20世纪70年代,产业发展可追溯到20世纪80年代。2010年以后,我国机器人装机容量逐年递增,开始面向机器人全产业链发展。自2013年起我国成为全球第一大工业机器人应用市场。近五年,中国机器人市场高速发展,是全球增长速度最快的市场。未来十年、十五年,中国机器人将保持全球第一的发展速度。
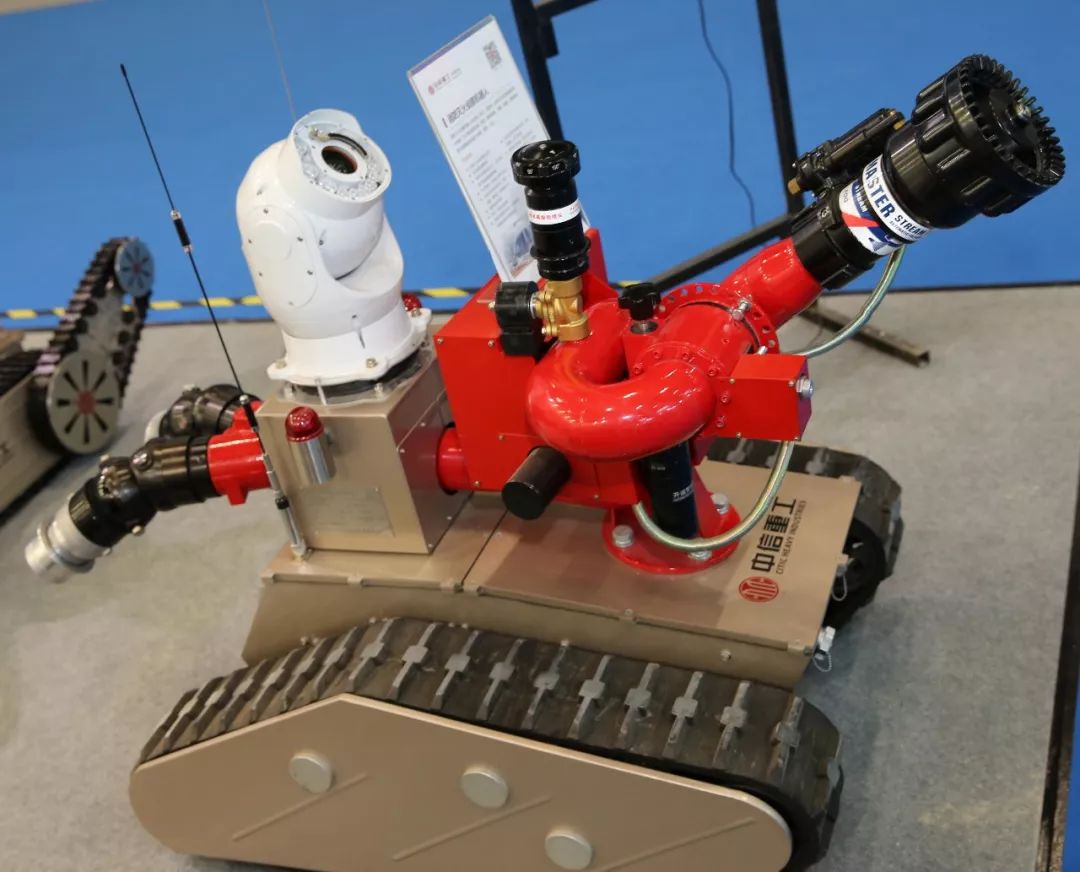
中信重工开诚智能装备有限公司在第八届中国国际安全生产及职业健康展览会上展示的消防灭火侦察机器人
据国际机器人联合会(IFR)统计,2017年全球机器人市场规模已达232亿美元。2017年我国机器人销售13.8万台,同比增长58.1%。根据国家统计局数据,2017年我国机器人产量为13.1万台,同比增长68.1%。2018年1-5月,我国机器人产量6万台,同比增长33.7%,保持高增长态势。2017年机器人应用已经覆盖我国国民经济39个行业大类,110个行业中类,应用领域的多元化,打开了中国机器人市场,将促进行业的持续增长。
据国际机器人联合会预测,未来三年,中国将在全球工业机器人领域起主导地位,并保持快速增长的趋势。到2019年,中国工业机器人的销售量将达16万台,占全球销售量的40%。
目前,国际上一般把机器人分为工业机器人和服务机器人。服务机器人可进一步划分为特种机器人、公共服务机器人、个人/家庭服务机器人。特种机器人是指由专业人员操控、面向国家与特种任务的服务机器人,包括搜救救援机器人、水下作业机器人、空间探测机器人等。
服务机器人是一种新型智能化装备、一项战略性高技术产品,在未来具有比工业机器人更大的市场空间。预计在2020年,全球服务机器人市场份额将快速增长至69亿美元。服务机器人正逐渐成长为推动全球社会经济发展的新生力量。
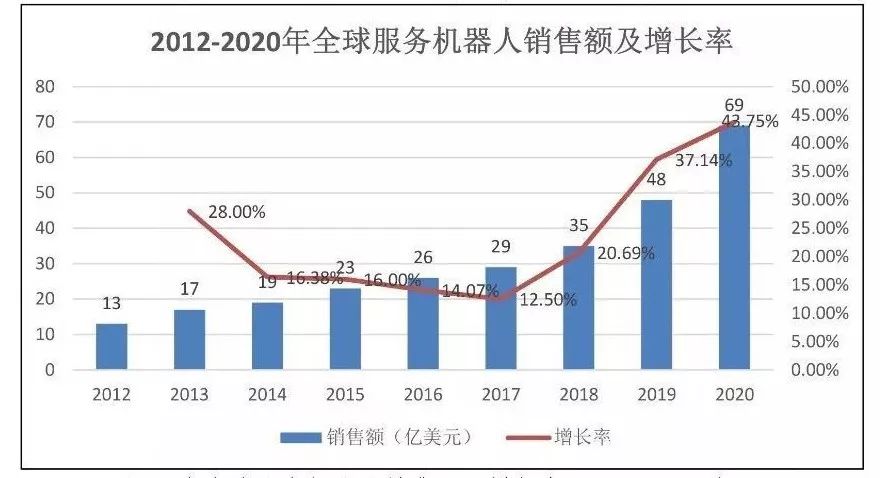
2012-2020年全球服务机器人销售额及增长率
根据事故类型的不同,救援机器人可以分为消防救援机器人、地震救援机器人、矿山救援机器人、核事故救援机器人和水下救援机器人。这5类机器人均为特种机器人,属于服务机器人范畴。

北京凌天世纪控股股份有限公司在第八届中国国际安全生产及职业健康展览会上展示的消防侦察机器人
我国对于应用于不同领域的机器人产品,实施不同的发展战略,着重发展特殊服役环境下作业的特种机器人。当前,我国救灾救援、公共安全等领域对服务机器人的需求呈现出快速发展的趋势。
发展人工智能成为国家战略
近年来,我国党和政府已经充分认识到机器人对于经济发展、产业升级改造的重要性,制定了相关政策指导文件,规划机器人产业的发展。
党的十九大报告提出,加快建设制造强国,推动互联网、大数据、人工智能和实体经济深度融合。自此,大力发展人工智能已经提升到国家战略的高度。
《智能制造发展规划(2016-2020年)》提出,促进服务机器人等产品研发、设计和产业化。

北京凌天世纪控股股份有限公司在第八届中国国际安全生产及职业健康展览会上展示的消防灭火机器人
《机器人产业发展规划(2016-2020年)》要求,到2020年服务机器人年销售收入超过300亿元,反恐防暴、救灾救援等领域的服务机器人技术水平接近国际水平。围绕救援救灾、能源安全、公共安全等领域,培育特殊作业等方面的需求,重点发展消防救援机器人等四种标志性产品。在救灾救援领域,推进专业服务机器人在自然灾害、火灾、核事故、危险品爆炸现场的示范应用等。
《国家中长期科学和技术发展规划纲要(2006-2020年)》明确指出将智能服务机器人列为应超前部署的前沿技术之一。
《国民经济和社会发展第十三个五年规划纲要》明确要求,提升新兴产业支撑作用,大力推进机器人等新兴前沿领域创新和产业化,形成一批新增长点。
《安全生产应急管理“十三五”规划》则明确,安全生产应急产业示范重点方向为:应急救援无人航空器;应急救援机器人等。
2018年6月19日,国家机器人创新中心在中国科学院沈阳自动化研究所揭牌。国家机器人创新中心承载着解决我国机器人行业“产业基础问题和共性关键技术研究,提升我国机器人技术和创新能力进入世界先进水平”的战略任务。
消防救援机器人
2016年,全国共接报火灾31.2万起,死亡1582人。2005-2013年,消防部队灭火救援中共发生70起消防员伤亡事故,造成消防员85人死亡,163人受伤。
消防机器人在危险性大或者普通消防设备无法有效实施的场地,可以代替消防人员进入有毒、浓烟、高温、缺氧等高危险性灭火救援现场完成侦查检验、搜索救人、灭火控制等任务,在保护消防员安全的同时提高了消防部队灭火救援能力。
2015年8月,国务院安全生产委员会发布紧急通知,强调大力推广应用先进的安全技术装备,未来将实现多功能消防机器人对单一消防车的逐步替代。
《机器人产业发展规划(2016-2020年)》要求,推进重大标志性产品率先突破。作为“十大标志性产品”之一的消防救援机器人,要实现满足自然灾害和恶性事故等现场对灾情侦察和快速处理的需求,在高温高压、有毒有害等特殊环境下,可完成人员搜索、灾情探测定位、定点抛投、排障、灭火和救援等任务。
1.研发历程
消防机器人发展经历了3个阶段:第一代程序控制的消防机器人,第二代具有感觉功能的消防机器人,以及初级第三代智能消防机器人。目前,消防机器人的智能化是世界各国主要研究方向。
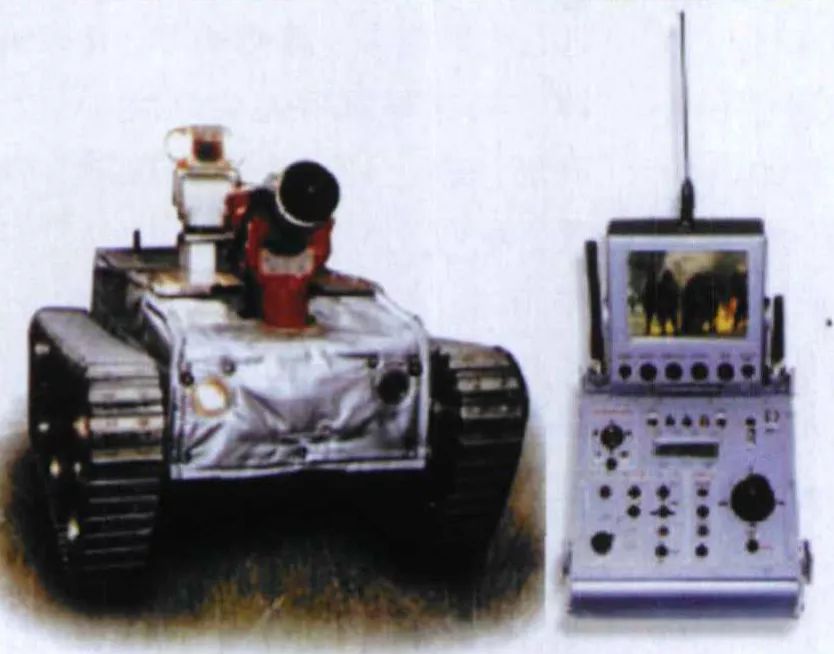
美国FFR-1型消防机器人
消防救援机器人的研究最早可以追溯到20世纪80年代。1984年11月,日本消防部门最先开始研究消防救援机器人。美国InRob Tech公司研制了FFR-1型消防机器人。该机器人在高温环境中具有顽强的生命力,已经十分接近于现代的消防机器人。英国智能化保安公司生产的RO-VEH遥控消防车已经装备英国中部和西部消防部门。
1997年,我国开始对消防救援机器人进行研发。2002年6月,由公安部上海消防科学研究所、上海交通大学、上海市消防局3家单位共同承担的国家“863”项目“履带式、轮式消防灭火机器人”研制成功并顺利通过国家验收。该消防机器人的研制成功标志着我国第一代(多功能)消防机器人正式诞生。我国第1台消防灭火机器人JMX-LT50,又称自行式水-泡沫消防炮,是一种结合多种消防灭火手段为一体的新型消防装备。此后,全国多个省市配备了这款消防机器人。

我国JMX-LT50型消防灭火机器人
2.推广应用
1986年,日本东京消防厅首次使用“彩虹5号”消防机器人参与灭火。该机器人本质上是1 台消防车。此后,消防机器人逐渐在灭火救灾领域应用,消防机器人技术得到快速发展。
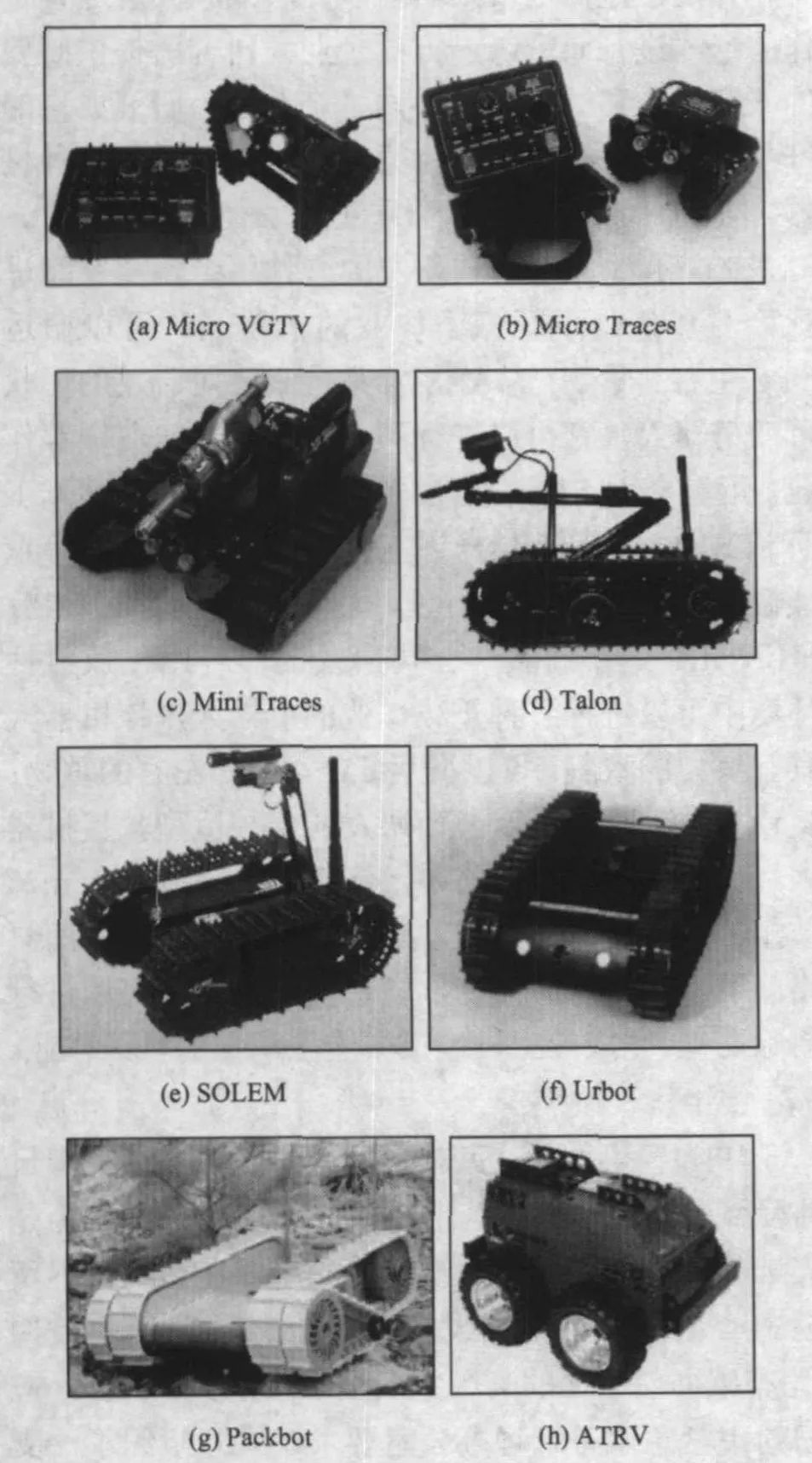
美国“9•11”事件中参与救援的8种机器人
2001年,“9•11”事件的灾难现场救援被认为是美国历史上救援机器人的第一次实际应用。《时代周刊》报道,在参与救援的最初10天中,8种救援机器人在搜救犬、人力无法抵达的狭小或危险区域找到10余具遇难者的遗体,与现场人力搜救找到的人员数量大致相当,但所用时间仅为现场救援人员的一半。
目前, 在国外已有多种不同功能的消防机器人用于救灾现场。
2002年我国云南省、湖北省相继配备了灭火机器人;2003年9月15日,湖北省利川市一口废弃的天然气井口发生强烈井喷,灭火机器人首次投入实战。2003年10月,我国江苏省、香港地区开始大规模配备消防灭火机器人。
截至2016年,全国各省消防总队配备的消防机器人平均只有2-5台,且都集中在经济发展的城市和地区。此外,有明确记录的消防机器人参与的灭火救援次数约30次。造价高昂、维护保养技术要求高、人机协同能力弱等因素,制约了我国消防机器人的大规模推广应用。
3.新技术新产品

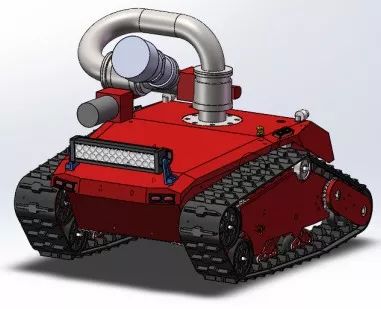
中信重工开诚智能装备有限公司研制的“防爆消防灭火侦察机器人”参与“第二届全国危险化学品救援技术竞赛”期间的演练活动

防爆消防灭火侦察机器人
2016年8月,在“第二届全国危险化学品救援技术竞赛”期间的演练活动中,中信重工开诚智能装备有限公司研制的6台防爆消防灭火侦察机器人组成消防机器人编队,全方位执行侦察、灭火、救援任务。2016年9月,中信重工开诚智能装备有限公司在第八届中国国际安全生产及职业健康展览会上展出的“防爆消防灭火侦察机器人”,能够远程控制消防炮回转、俯仰,具有大流量、高射程、多种喷射方式,且有互联网通信、远程诊断、环境探测、热眼检测、声音采集、图像采集、自主避障、现场救援等功能。该款产品被列入了《第八届中国国际安全生产及职业健康展览会优秀技术装备目录》(安监总厅科技函〔2017〕57号)中,并被推广应用。

RXR-CJD防爆消防侦察机器人
此外,该公司研制的RXR-CJD防爆消防侦察机器人,采用摆臂式履带载体机构、耐高温和防水防爆设计,搭载多参数气体传感器等,可实现超快速部署。

RXR-C12BD消防侦察机器人
北京凌天世纪控股股份有限公司研制的RXR-C12BD消防侦察机器人,底盘采用全地形设计,即前后4摆臂+履带+金属轮胎的三合一底盘结构,能适应各种地形对环境进行视频采集,监测有害气体浓度、辐射强度等数据,并实时传输至指挥中心。
昊元—JYZC16(A)型救援侦测机器人
北京昊元安通科技发展有限公司研制的昊元—JYZC16(A)型救援侦测机器人,搭载自主开发的、可同时检测8种有毒、可燃气体及核辐射浓度的专用检测仪。同时,配备高清晰防爆摄像头,红外热成像仪等现场视频图像监控系统,可以实时将探测到的灾害事故现场各项数据和视频图像远距离传输至后方处理系统。
以上消防救援机器人研制单位,将于2018年10月15-17日在杭州举办的第九届中国国际安全生产及职业健康展览会上展示其最新研发的技术和产品,同时将参加《第九届中国国际安全生产及职业健康展览会优秀技术装备目录》的遴选活动。
同期同地举办的第九届中国国际安全生产论坛,将设“消防分论坛”,来自应急管理部消防局、上海消防研究所、国际消防协会联盟、美国消防协会、日本消防协会、德国VDS认证机构等单位的专家学者,将就智慧消防、消防无人装备体系等行业热点话题进行研讨交流。
矿山救援机器人
我国是世界上最大的煤炭生产国和消费国。2018年上半年,全国规模以上煤炭企业原煤产量17亿吨。自然条件差、高瓦斯矿井多等诸多因素导致我国煤矿事故多发。2018年上半年,全国煤矿事故死亡155人,安全警钟再次敲响。因此,研发具有环境探测和搜救功能的煤矿救灾机器人十分必要。
1.研发历程
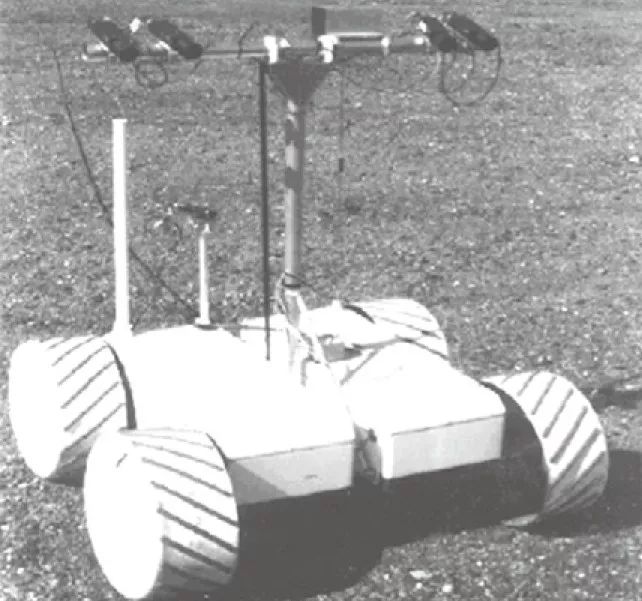
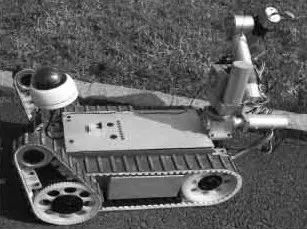
RATLER矿井探索机器人

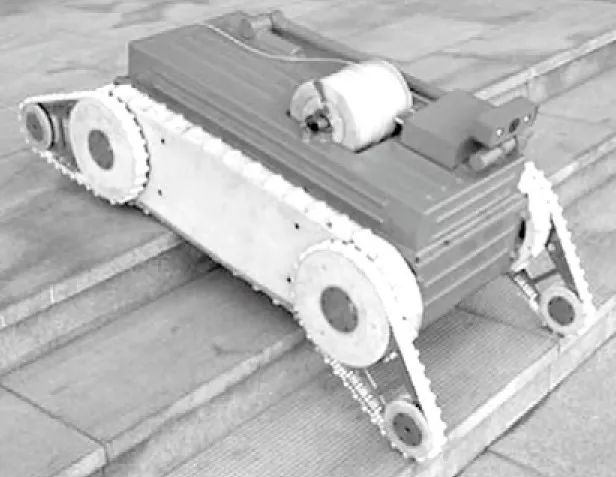
CUMT-I型矿山救援机器人
世界上第1台矿山救援机器人是由美国智能系统与机器人中心于1998年研发的“RATLER矿井探索机器人”。中国第1台矿山救援机器人是由中国矿业大学于2006年6月研制的“CUMT-I型矿山救援机器人”,至今已发展到第4代,做到了集环境探测、给养运输、灭火、救运伤员于一体。
井下探测救援机器人
2009年12月, 具有生命探测功能的“井下探测救援机器人”在山东省科学院研制成功。该井下救援机器人具有井下防爆抗水、生命探测等功能,可以将采集到的各种信息以图像、声音和数据等形式传送到主控制中心。

煤矿井下探测机器人
2010年9月,在第九届中国国际装备制造业博览会上,由中科院沈阳自动化研究所研制的“煤矿井下探测机器人”荣获唯一一个“特别奖”。“煤矿井下探测机器人”外形看上去像一辆小型装甲车, 在它的前后有两个红外线摄像头, 可以把井下影像传到地面。它的“头部”是甲烷、一氧化碳、氧气3种气体的传感器,通过传感器向地面传送各种气体的数据。
2011 年,由唐山市质监局、唐山开诚集团组织编写了我国第一个关于矿用井下机器人的省级地方标准——《矿用井下机器人技术规范》,填补了国内空白。
2.推广应用

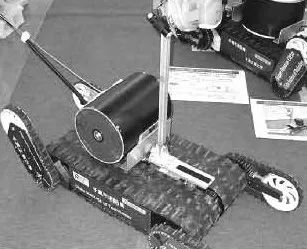
美国V2救援机器人
2006年年初,美国西弗吉尼亚Sago煤矿发生矿难,造成12名矿工死亡。美国劳工部矿山安全健康局通过深孔向井下派出了V2救援机器人,但最终因机器人行进过程中陷入泥潭而受阻。V2救援机器人是世界上最早并且也是唯一在美国投入使用的煤矿救灾机器人。
新西兰排爆机器人
2010年11月,新西兰派克河煤矿瓦斯爆炸事故导致29名矿工遇难。在救援中,救援人员使用国防部提供的机器人监测井下空气质量,但因机器人在巷道勘测时进水短路使救援工作难以快速进行。随后来自澳大利亚的特种机器人协助救援,但在机器人下井之前矿井发生了第二次爆炸,使救援工作彻底瘫痪。
2010年山西王家岭矿“3•28”透水事故造成38名矿工遇难。在救援时,中科院沈阳自动化研究所研制的水下机器人曾被带到现场,最终因井下水源浑浊且杂物太多、井下巷道地形复杂等原因而无法应用。
矿山救援机器人的研发难度大,相比于其他救援机器人,其应用情况相对滞后。
3.新技术新产品

灾区侦测机器人
中信重工开诚智能装备有限公司是国内最早进行煤矿救灾机器人研发和产业化的公司。该公司研发的“灾区侦测机器人”主要用于对具有潜在危险区域或人员无法进入区域的探测,代替抢险人员及时进入现场并实时传回现场数据。该机器人具有良好的地面适应性和通行能力,防爆、防水双重设计,同时具备运动控制、图像采集、双向对讲、环境探测、网络传输、辅助运输等功能。

CUMT-Ⅴ型煤矿救灾机器人
经过“煤矿井下环境探测与搜救机器人系统”和“矿灾救援机器人研究开发与应用”这2个国家“863计划”重点项目课题的深入研究和开发,中国矿业大学研制的CUMT-Ⅴ型煤矿救灾机器人获得了煤矿安全认证。
目前,国内取得煤安证书的矿用救援机器人仅为中信重工开诚智能装备有限公司研制的KQR48型矿用侦测机器人,以及中国矿业大学研制的CUMT-V型煤矿救援机器人,获得了进入矿井进行救援的许可。

ZRK便携式矿用本安探测机器人
中煤科工集团重庆研究院有限公司研制的“ZRK便携式矿用本安探测机器人及智能掌控预警系统”,能自组织集群工作及通信联络;可协同组队,连续区域覆盖与长时间静止和移动探测,实时定位现场位置及反馈行程;具有高便携与高移动灵活性、高可靠性传输等特点。该系统能辅助或代替应急人员现场执法、战备值守或救援探测,并将实时掌握灾情和灾变趋势实时传输到各级救援指挥人员掌控终端及中心平台。
地震救援机器人
近年来,全球范围的地震灾害频发,给当前的现场救援工作带来了巨大的挑战。大多数情况下,地震现场存在的诸多不确定因素影响了救援人员快速、高效、安全地开展工作。因此,辅助人类进行地震搜救工作的机器人成为地震应急救援技术发展的一个重要方向。
1.研发历程

ACM 系列蛇形机器人
地震救援机器人的正式研发始于美国“9•11”事件后。日本是一个多地震的国家,因此其对于地震救援机器人的研发处于世界前列。除了通用的履带式搜救机器人,日本广濑实验室还开发出了ACM 系列蛇形机器人。

旋翼飞行机器人
废墟表面搜索机器人

狭小缝隙搜索机器人
我国从“十一五”开始重视地震搜救装备的研发。2007年“地震废墟搜索与辅助救援机器人研制”课题被列入国家“863计划”重点项目“救灾救援危险作业机器人技术研究”之中。2011年3月,中科院沈阳自动化研究所机器人学国家重点实验室与中国地震应急搜救中心成功研制出了旋翼飞行机器人、废墟表面搜索机器人和狭小缝隙搜索机器人,可深入废墟、危险化学品环境实行救援。

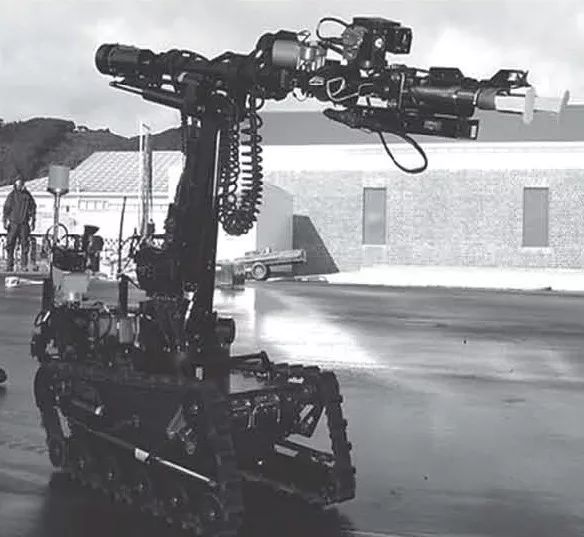
双动力智能型双臂手系列化救援工程机器人
2013年1 月,30吨型“双动力智能型双臂手系列化救援工程机器人”在新沂下线。该款机器人可在坍塌废墟现场实现剪切、破碎、切割、扩张、抓取等10项抢险任务作业。
2.推广应用
2013年4月20日,四川雅安芦山发生7.0 级地震,造成人员严重伤亡。中国地震应急搜救中心与中国科学院沈阳自动化研究所研制的“旋翼空中搜索机器人”和“废墟洞穴可变形机器人”第一时间赶赴现场,在废墟排查、获取震区交通信息、确定建筑物破坏等方面发挥了一定的作用,实现了国家“863计划”项目科研成果首次在地震现场实际救援工作中的实战应用。
双动力智能型双臂手系列化救援工程机器人在四川雅安地震救援中,在清理废墟、拆除受损房屋方面也发挥了重要作用。
核事故救援机器人
随着核电产业的较快发展和核安全的需要,尤其是日本福岛核事故发生后救援不利的情况,日益显现出开发核电站特定环境下机器人替代人工进行核电站应急响应和救援的需求。
1.研发历程
核事故救援机器人的研究源于1986年的切尔诺贝利核事故。切尔诺贝利核事故发生后,投入了一批机器人用于清理高放射性现场的垃圾。一个德国机器人只持续了7分钟,辐射就摧毁了机器人机载的电子部件,使其丧失了工作能力。因此只好采用人工救援,这却导致了31名消防和救护人员死亡。切尔诺贝利事件引起了人们对于高辐射条件下救援机器人的重视。其中,卡耐基梅隆大学的RedZone 机器人公司研制了ROSIE、Pinoeer等机器人系统。

Pioneer机器人
日本福岛核事故后,各核电大国均加大了核电站救援机器人的研发力度,呈现了新的研发趋势。2012年11月,日本东芝公司发布了名为“福岛探索者”的一款四足机器人,该机器人可用于福岛第一核电站,检测残留的放射性物质。
2012年中广核集团牵头承担了国家“863 计划”项目“核反应堆专用机器人技术与应用”和“973 计划”项目“核电站紧急救灾机器人的基础科学问题”。其中“核反应堆专用机器人技术与应用”项目研发了6 款机器人。
2.推广应用

PackBot机器人
Qulnce机器人
2011年,日本福岛核事故发生2个月后,美国Riobot公司的PackBot510机器人、Warrior710机器人和日本千叶工业大学的Qulnce系列机器人先后进入反应堆厂房内部,进行事故现场的实景拍摄和环境辐射剂量的测量。
3.新技术新产品

Delfin 耐辐照水下潜艇
德凯达工业技术服务(广州)有限公司研制的“Delfin 耐辐照水下潜艇”,实现了多功能集成模块,如异物打捞等功能,主要用于反应堆压力容器、堆芯吊篮检查井等一回路主设备中。
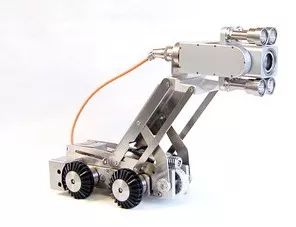
水下耐辐照探测车
德凯达工业技术服务(广州)有限公司研制的“水下耐辐照探测车”,耐水深50米,实现了多功能集成模块,如夹钳等功能,带有机械臂可保证配套模块更大的扩展性,用于反应堆、构件水池、相关尺寸管道、容器等设备的检测应急使用。

水下耐辐照爬行车
德凯达工业技术服务(广州)有限公司研制的“水下耐辐照爬行车”,耐水深50米,主要用于反应堆、构件水池、传输水池,乏燃料等水池、相关尺寸管道、容器等设备的检测检查应急使用。
水下救援机器人
1.研发历程
世界上第1台经济型水下救援机器人是1974年由Hydro公司生产的RCV225型水下机器人,可以在深度为400m 的水下进行观测作业。1992年日本研制了无人潜艇“海沟号”机器人,其最大下潜深度达到10 911.1m。之后,又有不同的水下救援机器人诞生。2013年,美国Video Ray公司研制了多种水下救援机器人,这些机器人具有强大的水下导航、探测等功能。
在我国,中国船舶重工集团702所研制的浅水域水下搜救机器人,具有水下摄像机、成像声纳、定位声纳、单自由度机械手等部件,最大水深为100m,可以对浅水域的水下物品和人员进行搜救。
2.推广应用

自主水下机器人蓝鳍-21
2014年4月14日,美国军方派出了自主水下机器人蓝鳍-21进行马航MH370的搜救工作。其能在最深6 000m的海底行走,配备了雷达、照相机、摄像机和精确导航系统。在韩国“岁月”号客轮的搜救行动中,韩国研发的“螃蟹机器人”投入到了救援当中。我国四川广元沉船事故中,水下搜救机器人在水下作业时发现了3具遗体。
3.新技术新产品

中信重工开诚智能装备有限公司研制的“水下机器人”
中信重工开诚智能装备有限公司研制的“水下机器人”,最大下潜深度300m,能够实现水平方向360°任意角度平移。该机器人具备优良的探测能力和精确的定位能力,其搭载的高分辨率多波束前视声呐能够实现水平方向130°、120米的大范围探测。在水下搜救打捞作业中,能够快速准确地发现目标,为搜救打捞作业节约时间。

北京博朗德科技有限公司研制的“水下机器人”
北京博朗德科技有限公司研制的“水下机器人”,可自动下潜、前进、追踪,并可根据不同用途配备不同功能单元,包括外部GPS屏幕覆盖、外部文件屏幕覆盖、追踪系统、激光棒、录音系统、声纳、机械臂等功能单元,可用于水下探测、水下追踪、观测等。
发展趋势
中国工程院院士王天然指出,与人共融机器人是当前机器人的主要发展方向。服务机器人同样需要与人共融,直接为人服务的机器人尤为需要。只有当服务机器人不再是游离于人之外的机械装备,才能更好地服务于人。与人的共融改变了人与机器人的关系,是下一代机器人的本质特征。
当前救援机器人的技术还无法完全满足复杂灾难现场救援任务的要求。机器人的移动能力、感知能力、通信能力、续航能力以及特殊环境下对于机器人的特定要求均制约了救援机器人的应用。其中,机器人在复杂环境下的移动能力是这些制约因素中最重要的一个因素。
救援机器人的技术发展方向为:救援功能集成化、救援行为自主化、救援任务协同化、救援装备轻量化。救援行为的自主化与救援设备的轻量化应是所有发展方向中优先研究的。
救援机器人技术集成度高,涵盖了机器人控制器、传感器、移动技术、远程通信等部件和领域在内的多项核心技术,一旦取得进步,必将对我国机器人产业起到巨大的提升作用。
目前国内最新研制的各类救援机器人,将于2018年10月15-17日在杭州举办的第九届中国国际安全生产及职业健康展览会上进行展示,同时将参加《第九届中国国际安全生产及职业健康展览会优秀技术装备目录》的遴选活动。本届展览会分为安全发展主题馆、应急产业与安全产业专题馆、个体防护装备专题馆、公共安全专题馆4个展区进行展示。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号