我们为什么要研发制造仿生机器鱼?
在巡游方面,大型的海洋鱼类如金枪鱼的游动速度达到80km/h,推进效率能接近90%,远高于常规水下航行器的40%-50%的机械效率。
在机动性能方面,鱼类将桨—舵功能合二为一,可以调整游动方向而不减速,并且其转向半径只有体长的10%-30%。
而传统的水下航行器通常先需要减速一半,完成一个回转圈需要3-5倍体长的半径。
此外,鱼类还能够利用对鳍和中鳍的摆动,实现上下、左右和前后的灵活自如的游动,具有良好的操纵姿态能力和平稳性保持能力。

仿生机器鱼的四大优势
推进效率高
鱼类的高效率与其完善的流体性能有关。鱼类通过尾鳍的摆动能消除螺旋桨产生的与推进方向垂直的涡流,产生与推进方向一致的涡流,并且整理尾流,使其具有更加理想的流体力学性能,从而提高效率。
初步试验表明机器鱼的推进效率比常规水下设备高30%以上。采用机器鱼作为水下机械可大大节省能量,提高能源利用效率,从而提高了水下作业时间和作业范围。
机动性能好
机器鱼具有高速启动、加速的性能,以及可在小范围内实现不减速转向运动。研究发现,生活在水中的依靠敏捷运动才能生存的鱼类,可以不减速实现转向运动,并且其转向半径只有其身体长度的10%~30%。
而现在的机动船在转向时其速度要降低50%以上,并且其转向半径大。由于采用身体波动式推进的机器鱼体型细长,并且具有足够的柔韧性,使其在空间狭窄、空间结构复杂的场所有着更良好的机动性能。因此它可以在波涛汹涌、地势险峻的海洋环境中进行水下探测和水下作业。
噪音低、隐蔽性能高
军事应用方面,由于机器鱼在雷达上的表现形式与生物鱼类几乎相同,能够轻而易举地躲过声纳的探测和鱼雷的袭击,出其不意的攻击对方舰艇、基地,具有重大的军事应用前景。而且在民用上,可以用于海洋生物观察。
节能环保,对环境友好
由于仿生机器鱼的推进方式与其它的水下机器人不同,在水下时对周围生物几乎不会造成影响,最大还原了水体本来环境。当遇到特殊且复杂的水下环境时,仿生机器鱼可利用自身结构的优势,有效实现水中的灵活运动,适应不同环境,这是其它水下机器人没法做到的。同时由于采用波动式的推进方式,这种方式比螺旋桨推进节省3倍左右的能源。
以ROBOSEA公司自主研发的自主仿生机器鱼RoboLab-Edu为例进行分析。

RoboLab-Edu自主仿生机器鱼以热带盒子鱼为原型。采用单关节仿生尾鳍取代无刷推进器,有效降低设备运行噪声的同时节省了能量消耗。设备外壳采用光敏树脂材料3D打印制成,兼具轻便度与硬度。通过重力滑块机构实现设备的上浮下潜,控制更为灵活。具有水下图像识别、水声通信、路径规划等多种智能功能,最大下潜深度可达60m。
节能高效
采用单关节仿生尾鳍作为动力源,利用反卡门涡街的驱动原理,仿生推进效率高80%。
仿生设计
模拟热带盒子鱼的外形与游动方式,机动性强,有效降低对水下环境的扰动。
安全可靠
采用整体开放,局部密封的设计,配备红外避障传感器及照明灯,具有低电量返航、失联返航等功能。
二次开发
预留防水航插接口,可搭载PH、温度等外接传感器,开发新的功能。
实际应用
RoboLab-Edu 具有操作性强、代码开源等优势,适用于高校科研、中小学机器人教育等用途。可完成运动控制理论验证,包括机械机构设计、电子电路、算法优化以及多机器人编队等任RoboLab-Edu 单关节仿生机器鱼根据应用场景和使用需求,除高精度GPS、九轴姿态传感器以及水声通信等标准模块外,还可以搭载多种水质传感器,进一步丰富产品功能,将其升级为小型水下科研平台。
关于仿生机器鱼的具体研究,我们可以参考北京大学工学院谢广明教授在全球人工智能与机器人峰会上,发表的题为《智能仿生机器鱼》的演讲报告。
所谓仿生机器人就是具有生物特征和功能的机器人,我们的主要研究项目是智能仿生机器鱼。水下环境非常复杂,仿生鱼在水下的供能、通信等方面的能力非常有限。我们的目标是研究出机器鱼群,所以既要注重单体的研发,也要注重群体技术的研发,我们希望机器鱼群可以解决一些实际问题。
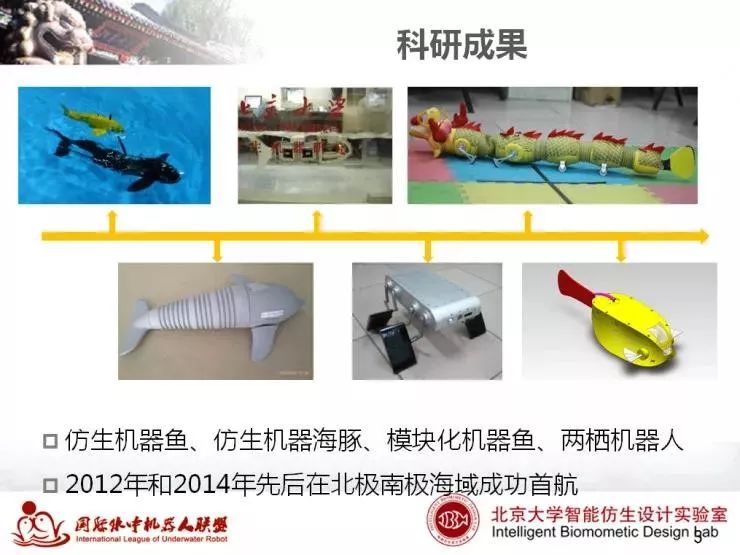
如图所示,这是我们现在做的机器人样机,包括仿鲤鱼、仿海豚,以及一些仿两栖类。我们研究这个项目已经有十来年了,目前取得了不错的成果。2012 年和 2014 年分别在南极和北极下水成功。
仿生箱鲀鱼
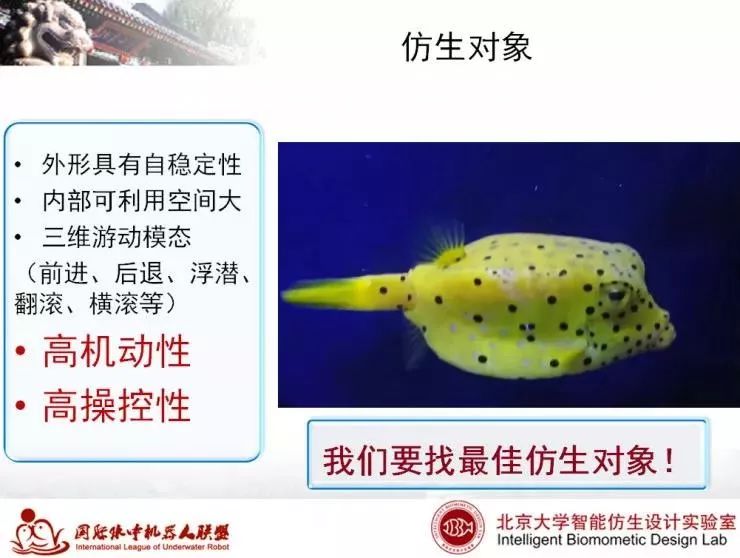
近几年,我们主要研究箱鲀鱼的仿生,箱鲀鱼的形状像一个盒子。由于仿生机器鱼内部负载空间通常很小,且基本被电机占据的,所以盒子状的仿箱鲀机器鱼可以增大内部空间。箱鲀鱼的外形也很有特点,它内凹的形状看上去很丑陋,其实面对水流冲击有很好的自稳效果。箱鲀鱼主要生活在珊瑚礁中环境较复杂的区域,它可以通过胸鳍和尾鳍组合拍动来灵活的运动,因此我们觉得它是很好的仿生对象。

我们开发完成的样机有一对独立驱动的胸鳍和摆动的尾鳍,胸鳍和尾鳍相互配合让机器鱼可以像真鱼一样游动。我们的仿生鱼可以前进、后退、上升、下降,我们接下来要实现前滚翻、后滚翻、侧滚,通过胸鳍和尾鳍的相互配合来实现一些复杂的动作。这样的话,将来到水下执行任务的时候,机器鱼就可以在复杂的环境中灵活的运动。
个体仿生到群体仿生
我们研究的基本思想就是向大自然学习,以大自然为老师,对于一些比较好的生物特性,我们可以尝试用于仿生机器人。个体仿生主要是实现高机动性、高效率的运动,通过通信组网我们可以实现群体仿生。我们设想这样一个应用场景,派成百上千成本低廉的机器鱼一起下水去搜索失事飞机,这成百上千的机器鱼很有可能完成这种「大海捞针」的任务。所以我还是想强调不仅要关注个体仿生也要关注群体仿生。
水下仿生机器鱼的实际应用
一是环保检测。
比如水质监测,现行的监测方法非常费劲——都是检测员划小船到指定点采水样,效率非常低,完全可以尝试用机器鱼去做这样的事。
二是污染源的探测。
很多厂家的把自己的排水管道隐蔽起来逃避监管。国外提出用蛇形机器人去追踪源头,其实机器鱼也可以完成任务。
三是垃圾清理。
我们希望以后可以让机器人去清理一些水上垃圾。水下垃圾我们希望也可以用机器人解决,比如一些蓄水池,现在的垃圾处理方法是把水抽干让人去清理,这种方法很费力,我们希望也可以用机器人去完成。再把场景拓展一下,我们希望以后仿生鱼可以应用于海洋污染治理。
四是管道检测。
由于管道是注水的,检测管道只能封死一段然后派人去检测,以后可以让机器人来完成这样的任务。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号