05
钢包口定位引导
应用描述
在钢铁精炼工艺过程中,需要把一般炼钢炉中初炼的钢水移到另一个容器中(主要是钢水包)进行精炼的过程,也叫“二次炼钢或炉外精炼”。该应用使用SICK 3D相机引导钢包转炉。
应用难点
👉 现场环境光线影响,对3D相机成像效果要求高;
👉 现场高温工作状态,对3D相机成像稳定性有极高要求。
应用选型
👉 SICK Ranger3,高速高精度,X像素数高达2560,扫描帧率高达46kHz(ROI模式:128rows);
👉 Ranger3可根据被测物的尺寸,灵活匹配不同镜头、光源,设计更适合的视野,取更优方案。
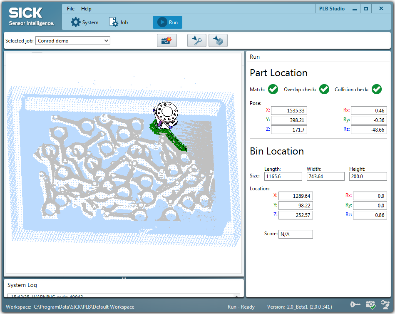
应用图示



3
06
工程机械制造过程中的定位引导
应用描述
工程机械结构件通常由切割板材件和铸钢件拼焊而成。
在钢材钣金切割分拣过程中,采用SICK分体3D相机,自由灵活搭配激光镜头,可实现500-3000mm不同大小钣金的定位引导。
在销轴及阀块加工等料框上料过程中,使用SICK产品PLB视觉系统配合机械手进行定位引导。
在焊接工艺过程中,采用SICK分体3D相机进行粗定位,再使用PLR视觉系统精定位,进行焊接定位引导。
应用难点
👉 产品种类多、视野大、精度要求高。
👉 现场环境光线影响,对3D相机成像效果要求高。
👉 焊接工位电磁干扰较强,电气条件苛刻。
应用选型
👉 SICK Ranger3/PLB/PLR视觉定位系统;
👉 Ranger3可根据型材的尺寸,设计更适合的视野,取更优方案。
应用图示












 粤公网安备 44010602004358号
粤公网安备 44010602004358号