论文地址:
http://arxiv.org/pdf/2002.01155v1.pdf
代码:https://github.com/xahidbuffon/deep-sesr.
来源:明尼苏达大学
论文名称:Simultaneous Enhancement and Super-Resolution of Underwater Imageryfor Improved Visual Perception
原文作者:Md Jahidul Islam
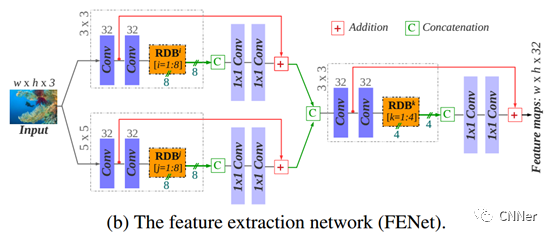
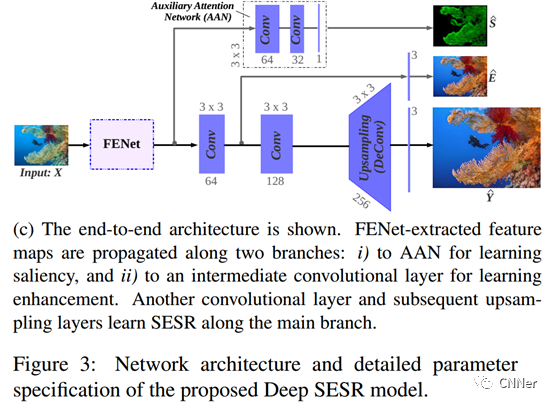
为解决水下机器人视觉的同步增强与超分辨率(simultaneous enhancementand super-resolution,SESR)问题,本文提出了Deep SESR模型,为近实时应用提供了一种有效的解决方案。在本文中Deep SESR是一种residual-in-residual network-based的生成模型,可以学习在2、3或4个更高的空间分辨率下恢复感知图像质量。我们通过制定一个多模态目标函数来监督模型的训练,该函数解决了特定颜色的水下颜色退化、缺失图像清晰度和高层次特征表示损失的问题。它还监督学习图像中突出的前景区域,进而引导网络学习全局对比度增强。本文中还设计了端到端的训练方式,在共享的层次特征空间上联合学习显著性预测和SESR,从而实现快速推理。此外,提出了第一个方便大规模的SESR学习的数据集——UFO-120,包含了1500多个训练样本和120个样本的基准测试集。通过对UFO-120和其他标准数据集进行深入的实验评估,证明了Deep SESR在水下图像增强和超分辨率方面优于现有的解决方案。同时,我们也验证了DeepSESR在几个测试用例(具有不同光谱和空间退化水平的水下图像,以及具有不可见的自然物体的陆地图像)中的泛化性能。最后,我们分析了Deep SESR在单板部署中的计算可行性,并展示了它在水下机器人视觉导航中的操作优势。
下面是论文具体框架结构以及实验结果:














 粤公网安备 44010602004358号
粤公网安备 44010602004358号