水下机器人没电了怎么办?能实现海底充电吗?日前,哈尔滨工程大学科研团队研发的 " 深海欠驱动 AUV 自主对接与非接触式能量补偿系统及应用 " 技术,获得了 2018 年度海洋工程科学技术一等奖。
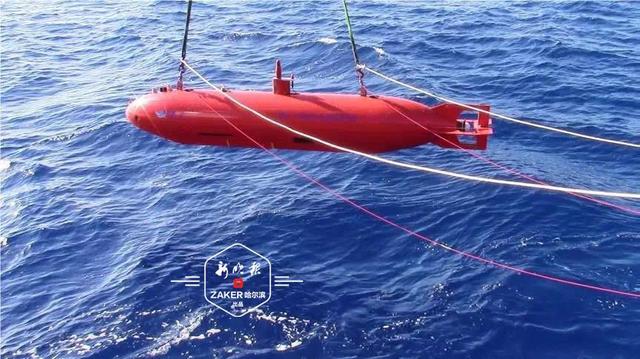
自治式水下无人潜器(AUV)是人类探测深海与开发深海的重要装备,但由于携带能源有限、无法长期作业以及水面布放、回收风险大、隐蔽性差等问题,长期以来制约着 AUV 的应用和发展。由于 AUV 水下对接环境复杂、信息源少、干扰严重等特点,深海欠驱动 AUV 水下自主对接与非接触式能量补偿一直是潜器技术应用发展的难点。
" 使水下机器人通过深海高精度对接技术,不但实现海下高效充电,还可以实现高效的信息传输。" 哈工程船舶学院韩端锋教授科研团队攻克了高精度声学导引、自主规划与控制、自适应对接装置调整等关键技术,在国内率先实现了 AUV 自主寻地、导航,并最终准确进入预定海域水下回收装置的功能。在对接精度、成功率等系列数据指标方面,均优于国外相关技术。对接控制精度提高了 4 倍,非接触式充电有效率提高了 35%,打破了国外公司的技术垄断。
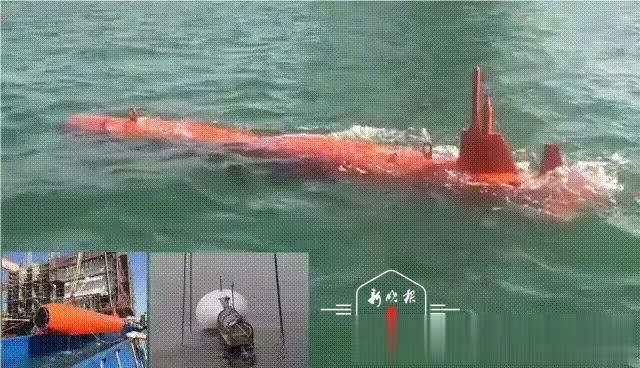
据了解,团队研发的深海欠驱动 AUV 自主对接与非接触式能量补偿系统可实现 AUV 布放回收、能源供给、信息交换功能,使 AUV 可实现大范围、长时间连续作业,在海洋探测、海洋工程、科学考察、水下无人作战网络等军民融合领域具有广泛的应用价值。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号