法国土伦大学COSMER实验室的研究人员针对缆索连接的2个水下机器人,提出利用视频图像中的缆索形状估计水下机器人的相对姿态。
水下机器人在海洋环境检测、水下资源勘探等领域有重要应用。研究人员针对缆索连接的2个水下机器人,研究了其相对位置的预测问题。两个机器人均配备摄像机、深度传感器和惯性测量单元,缆索总长1.5m、宽3cm、质量0.15kg。研究人员利用高斯-牛顿算法,对机器人视频图像中的缆索部分进行颜色分割,并通过非线性优化程序估算其三维形状。研究表明,即使图像中缆索局部可见或受到强烈干扰,也能通过缆索形状确定两个机器人的相对位置,允许水下机器人脱离彼此视场实施作业。
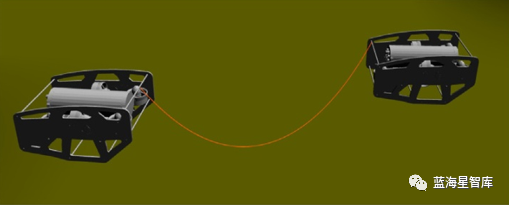
缆索连接的2个水下机器人
缆索连接的水下机器人可构建小型机器人编组,提高开放水域探索能力。这种相对姿态估计方法可为机器人队列导航提供技术支持。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号