在仿真试验中设定Kaxan推进器出现部分故障,最大推力只能达到正常情况下的0.5倍即W2=0.5。水下机器人从起始点(0, 0, 0)沿地面坐标系Oξ轴行进,运动控制结果如图12~图15所示。
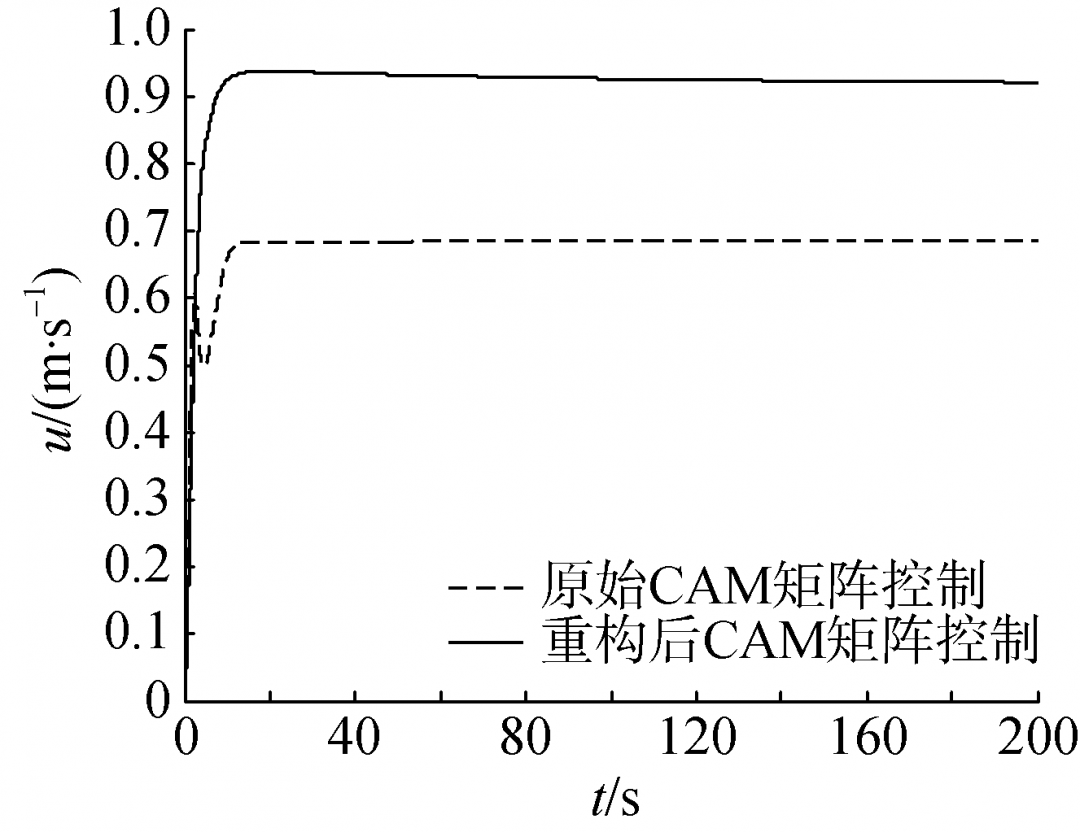
图12纵向速度(W2=0.5)
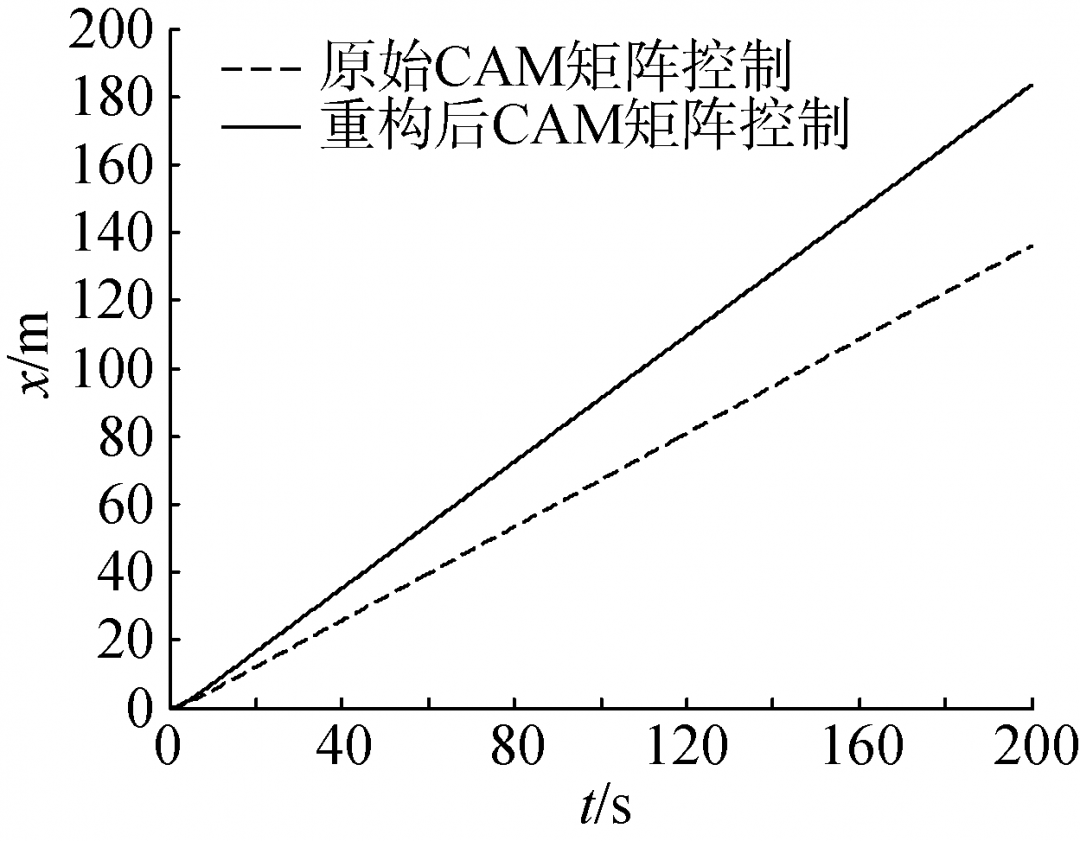
图13纵向位移(W2=0.5)
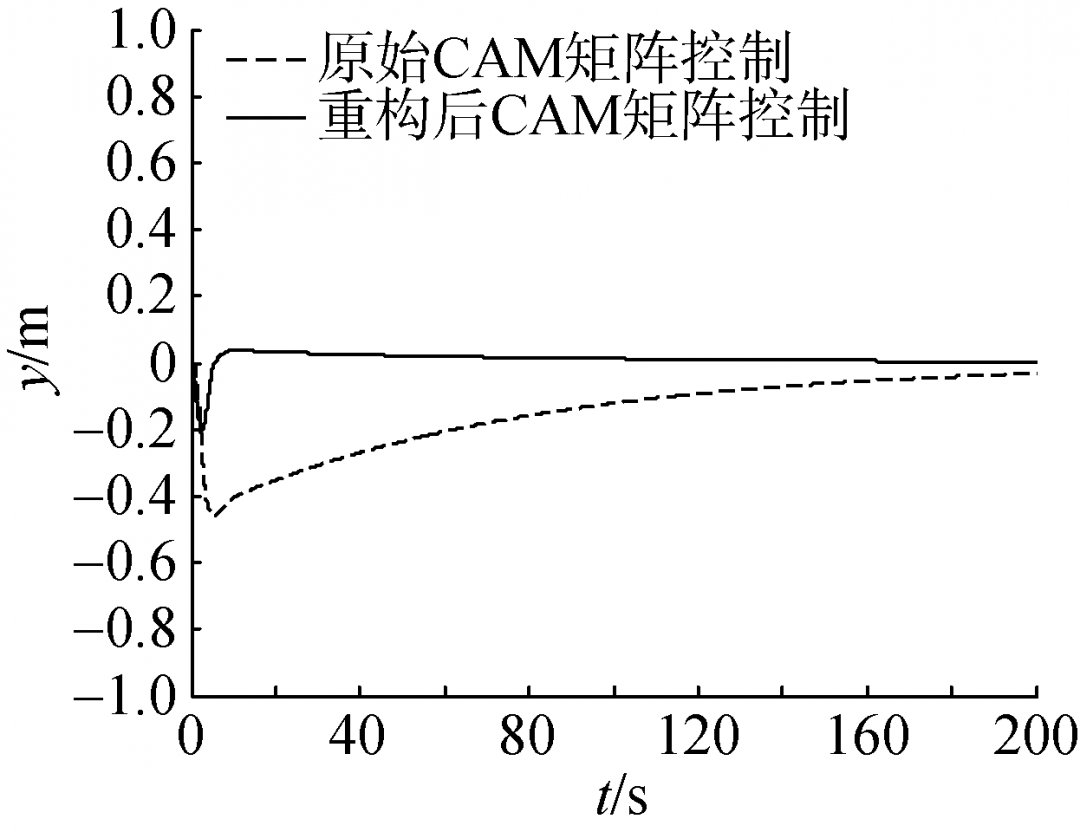
图14横向位移(W2=0.5)
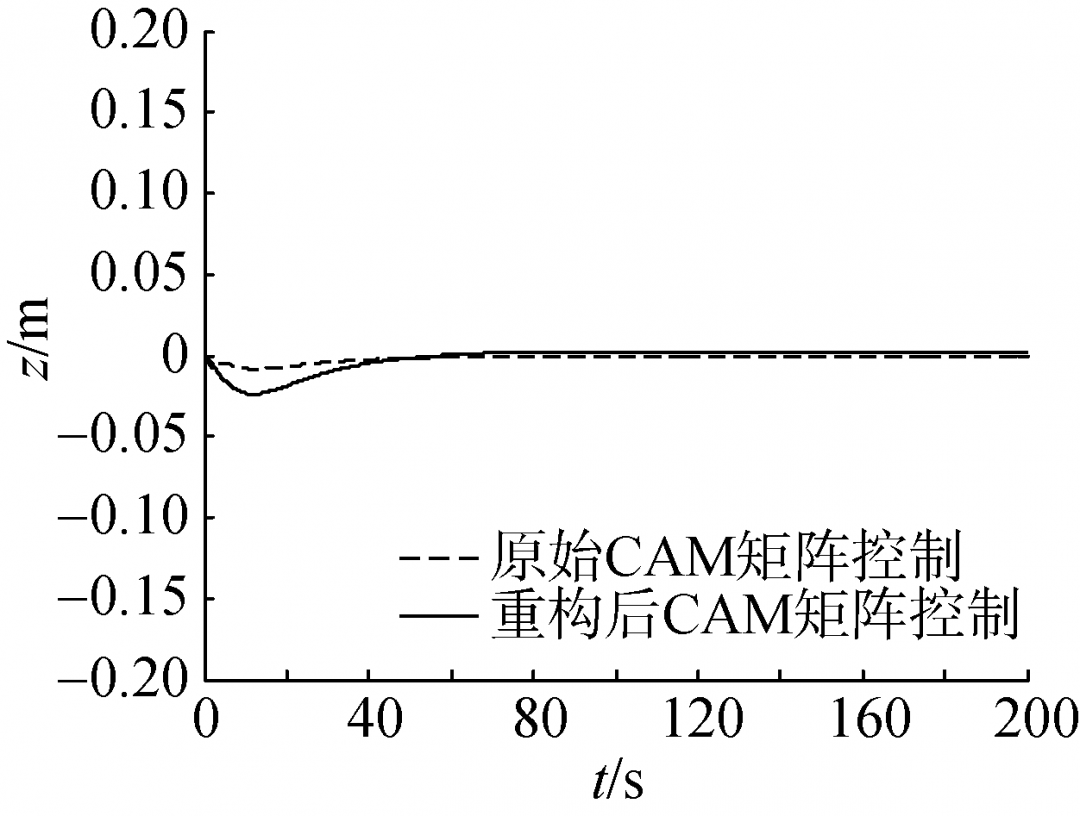
图15垂向位移(W2=0.5)
从图12和图13可以看出,在推进器T2出现部分故障不调整CAM矩阵时,稳定航行速度为0.687 m/s, 200 s内水下机器人在Oξ方向上前进了136 m。在重构后CAM矩阵的容错控制下,推进器T1和T4全速运转施加最大推力,推进器T3调整纵向偏差和艏向角偏差,使水下机器人保持固定艏向角-18.44°,即沿最大推力合力方向前行,稳定航行速度为0.92 m/s, 200 s内水下机器人在Oξ方向上前进了183 m,使得航行效率提升了34%。从图14和图15可以看出,当推进器T2出现部分故障时,垂向位移和横向位移也可以得到很好的控制,控制精度达到作业要求。
4 结束语
以Kaxan水下机器人为研究对象,针对水下机器人推进器出现的故障问题,提出了一种基于CAM矩阵和序列二次规划的推进器推力重构容错控制方法。该方法通过重构CAM矩阵在推进器出现故障的情况下进行推力再分配,实现了推进器推力的最大利用。分析仿真结果可知所提容错控制方法在水下机器人运动控制中是可行的,容错控制策略能够满足实际需求,且相对于未重构的CAM控制能够明显提升航行效率,具有一定的实际意义。文中对推进器冗余配置的水下机器人容错控制进行了初步研究,今后还需开展对于多个推进器出现故障的容错控制研究。
参考文献(略)
原文刊登于《水下无人系统学报》2021年第29卷第1期












 粤公网安备 44010602004358号
粤公网安备 44010602004358号