基础研究
基本信息
作者: 邱帅, 吕瑞, 范辉, 万亚民, 黄海, 杨管金子
单位:中国船舶集团有限公司第705研究所,陕西西安, 710077
基金项目:国家重点研发计划(2018YFC0810404)
针对水下机器人推进器出现故障后控制效果变差,无法完成指定任务,甚至可能造成机器人的丢失等问题,文中提出一种基于控制分配机(CAM)矩阵的水下机器人容错控制方法。利用CAM矩阵重构推力分配确保机器人航行稳定,同时使用序列二次规划方法寻找最大合力推力分配策略实现效率最大。通过仿真对所提方法进行有效性验证,结果表明,该容错控制方法能够处理推进器部分或完全失效故障并使机器人保持一定的性能稳定航行。
引言
占地表面积70%以上的海洋蕴含着丰富的矿产和生物等资源[1]。随着科学技术的发展和对海洋研究的不断深入,作为能够在深海环境下工作的水下机器人,在海洋开发中发挥着越来越重要的作用[2]。
水下机器人工作条件恶劣,周围环境复杂多变,在实际工作过程中,一旦出现故障,轻则无法完成预定作业任务,重则危及载体自身安全甚至无法回收,带来巨大的损失。容错控制技术的出现,为提高复杂系统的可靠性开辟了一条崭新的途径。
推进器系统作为水下机器人的重要组成部分,直接与海水接触,极易出现运行故障,出现故障后的推进器,其产生的推力达不到预定值,严重情况下完全无法产生推力,从而导致水下机器人无法按照指令行进。因此,对水下机器人推进器系统的容错控制就显得格外重要。文献[3]~[5]使用加权伪逆求得推进器出现故障情况下的推力分配最小范数解,可以实现水下稳定控制。文献[6]~[12]使用滑模容错控制器根据推进器故障调整控制器的输出以实现容错控制。文献[13]~[16]等使用神经网络进行故障辨识,调整控制参数保证运动控制系统的稳定性。此外,文献[17]将容错控制与动态控制器设计解耦,并在控制分配过程中以分配误差最小和控制成本最小为优化目标,采用非线性规划来解决容错控制问题。文献[18]将推进器故障视作一种干扰,设计出一种自抗扰控制器(active disturbance rejection controller, ADRC),并使用动态自适应算法来优化控制参数,取得了良好的控制性能。上述文献的容错控制方法仅能保证在推进器出现故障后稳定航行,但没有考虑到航行的效率问题。针对此,文中考虑出现故障后各个推进器实际所能产生推力大小,使用序列二次规划法寻找最大合推力,以推力最大利用为目的进行推力重构,保证机器人能够按指令实现稳定控制的同时,在能力范围内可以实现推力最大以及航行效率最优。
1 研究对象描述
1.1 推进器布局
常见的水下机器人大都具有4个水平推进器,用于水平面内的3个自由度(纵荡、横荡、艏摇)运动。选用Kaxan水下机器人[19]为研究对象,其推进器布局如图1所示。
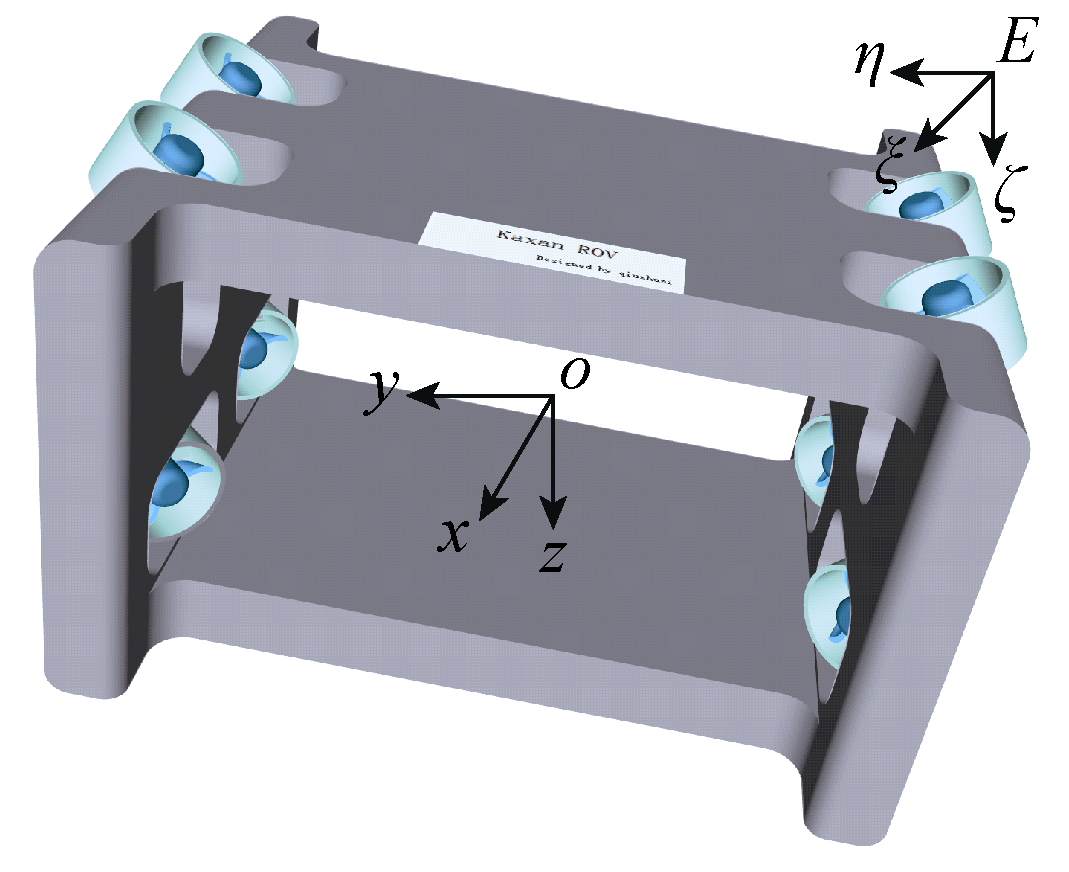
图1 Kaxan推进器布局示意图
Kaxan水下机器人在水平方向上配备4个与艏向夹角45°的推进器,主要负责驱动水下机器人在水平面上作直线运动和转动。竖直方向上配备了4个与垂直方向夹角30°的推进器,主要负责驱动水下机器人做升沉运动。推进器在体坐标系下的安装角度及位置参数如表1所示。
表1Kaxan推进器安装角度及位置参数
1.2 水下机器人动力学模型
2 容错控制设计
2.1推力分配方法
2.2 容错控制方法
3 仿真验证
由于CAM矩阵可以提供六自由度的控制指令,当某一推进器出现故障后, CAM矩阵将其视作一种干扰,进行稳定控制。但这种未经过调整的原始CAM矩阵没有考虑各个推进器推力的合力大小,而经过上节所述重构后的CAM矩阵能够使推进器产生更大的推力合力,使得水下机器人行驶效率更高。
在MATLAB/Simulink环境下,选用1.2节中水下机器人数学模型,结合CAM矩阵控制方法,进行仿真试验,验证所提容错控制方法的可行性和有效性。仿真结构图如图7所示。

图7 系统仿真结构图
在仿真试验中,设定KaxanT1推进器出现完全故障。水下机器人从起始点(0, 0, 0)沿地面坐标系的Oξ轴行进,运动控制结果如图8~图11所示。
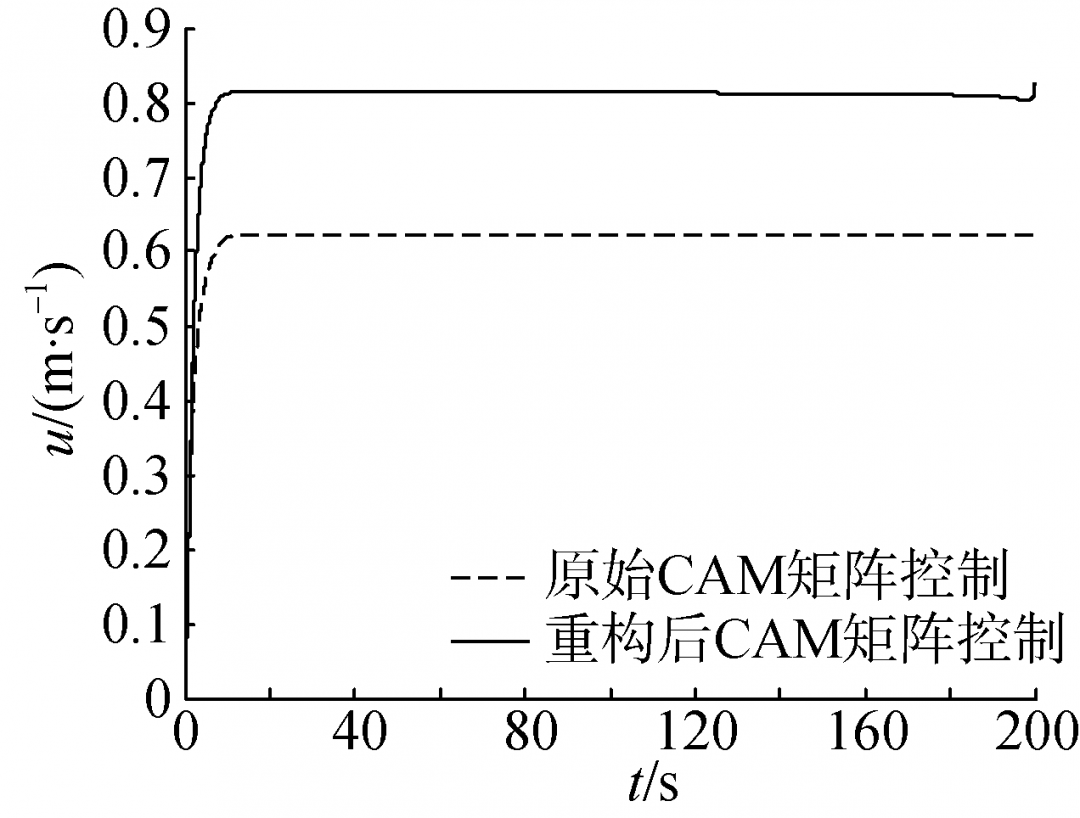
图8纵向速度(W1=0)

图9 纵向位移(W1=0)
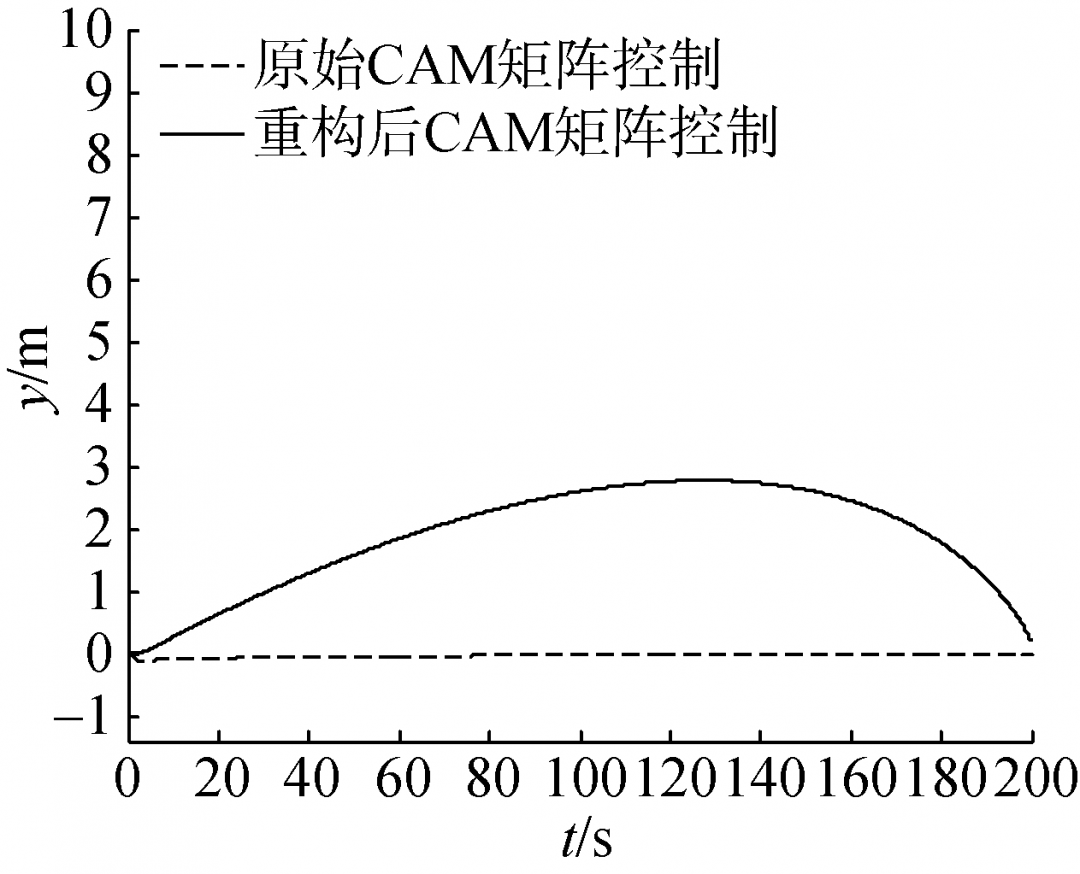
图10横向位移(W1=0)
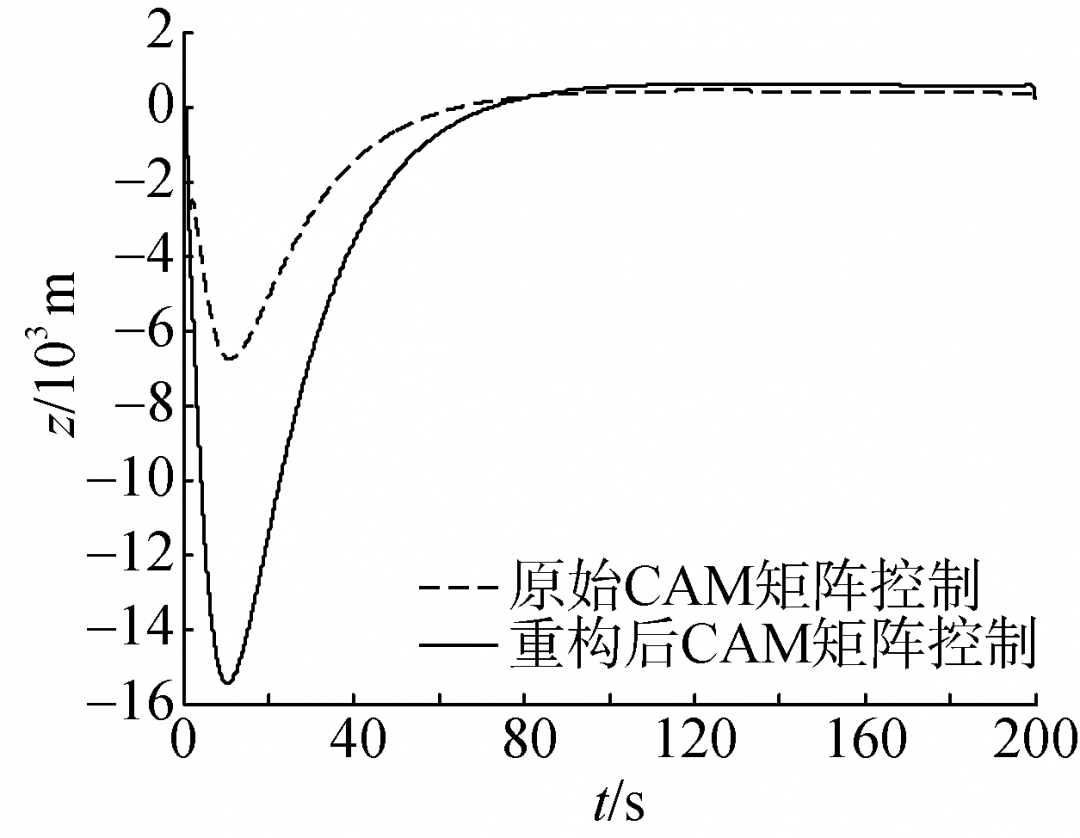
图11垂向位移(W1=0)
从图8和图9可以看出,在推进器T1出现完全故障不调整CAM矩阵时,稳定航行速度为0.62 m/s,200 s内水下机器人在Oξ方向上前进123.5 m。在重构后CAM矩阵的容错控制下,推进器T2和T3全速运转施加最大推力,推进器T4调整纵向偏差和艏向角偏差,使水下机器人保持固定艏向角45°即沿最大推力合力方向前行,稳定航行速度为0.815 m/s, 200 s内水下机器人在Oξ方向上前进了160.9 m,使得航行效率提升了30%。从图10和图11可以看出,采用文中所用容错控制方法后,垂向位移和横向位移都可以得到很好的控制,控制精度达到作业要求。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号