剪叉式浮动结构整体相对减震模块而言体积占用较大,其更多是与差速转向结构相结合,将两者结构空间合并。其结构不适用于对空间要求较高以及带有转向功能的舵轮布局。
在路面适应性中,剪叉式结构具有一定的局限性。如图14所示,当两驱动轮的路面高度不一致时,由于剪叉结构并没有更多的自由度来适应两侧的高度不平,则使AGV整体被倾斜地顶起。
(4)摆动桥式。摆动桥式结构通过整桥式将两个轮子连接起来,以桥的中心作为摆动中心与车体铰接。摆动桥式的路面适应结构常见于装载机以及相关的工程机械中,通过释放整桥的旋转自由度来适应地面的不平整。弹簧在该结构中主要起到了减缓冲击的作用,在实际的应用中,若路面仅仅只是不平整而没有给驱动单元带来更多的冲击,摆动桥式的浮动结构可以无须设置弹簧。地形的不平整使得两轮的支承力离摆动中心的距离不一样,则力臂较远的轮子支承力小,力臂较短的轮子支承力大,浮动结构由此来适应路面的不平。
对于一个摆动桥结构而言,两个轮子始终通过摆动适应不平路面,实际可视为将桥上两个轮子变化为整桥的1个大轮子。那么,对于摆动桥式的四轮布局来说(图 16所示),即将四轮布局变化为三轮布局,在三点确定一个平面的理论上,三个轮子必然接地,从而解决了所有轮子共同着地的问题。
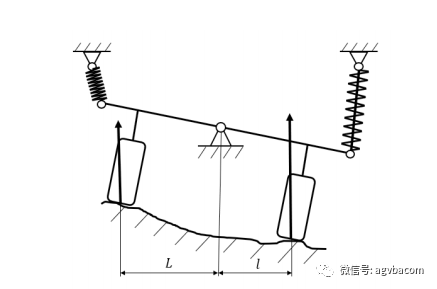
图15 摆动桥式浮动结构简图
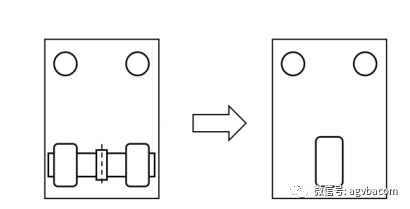
图16 摆动桥的轮系演变
对于六轮布局等多轮系布局,通过摆动桥式结构实现路面适应则需要设置更多组的摆动桥。由上述分析,一个摆动桥可视为将两个轮子变化为1个轮子。由于三
轮必定接地,六轮布局须将六轮变化为三轮,即需要3组摆动桥结构。
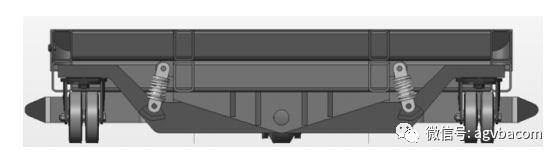
图17 摆动桥结构具体应用
(5)四边形式。四边形式浮动结构是基于四连杆的摆动原理,在其基础上增加减震弹簧,使其结构摆动时压缩减震弹簧而实现的减震效果。
四边形式浮动结构的减震型式比较类似于铰接摆动式浮动结构,两者均是通过绕着铰接点旋转来压缩减震弹簧从而起到减震效果,然而,这两者在运动结构以及受力上不全相同。
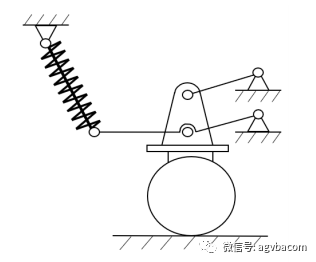
图18 四边形式浮动结构简图
如图19 所示,四边形式浮动结构的上下浮动方式是四连杆机构的摆动原理,而铰接摆动式浮动结构的上下浮动方式是绕铰接点作圆周运动的原理。
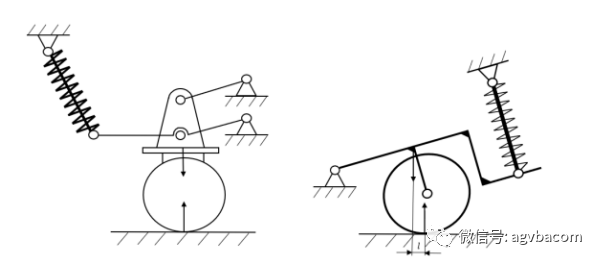
图19 四边形式与铰接摆动式的受力对比
四连杆的摆动原理可实现驱动单元在浮动时其姿态不会发生改变,而铰接摆动式结构的驱动单元在浮动过程其倾角会逐渐变化。倾角的变化使得驱动轮的支承力与安装座的支反力间产生力臂,从而使驱动单元受扭。
表1 AGV常见减震浮动结构特点分析
| 减震结构类型 | 适应性 | 空间占用 | 优点 | 局限点 | 适用范围 |
| 铰接摆动式 | 优 | 中等 | 小刚度的弹簧能提供更大的地面贴紧力,减震适应性较好。 | 存在双向受力差异性在受阻的方向驱动轮受扭,需要验算其结构强度 | 大载重,空间较充足的轮系布局 |
| 垂直导柱式 | 中等 | 小 | 占用空间小,结构简单 | 导柱容易因受扭而卡滞,应当要有润滑以及抗扭措施 | 轻中载,空间要求较高的轮系布局 |
| 剪叉式 | 差 | 较大 | 更易于与差速转向模块相结合 | 占用体积大,结构导致减震性较差 | 具备减震以及相对车体旋转功能的差速驱动布局 |
| 摆动桥式 | 中等 | 大 | 非特殊环境无需减震弹簧,结构简单,多桥组合的适应性较好 | 多轮系布局须多桥组合的结构才能适应不平路面。 | 多轮系且高度空间充足的轮系布局 |
| 四边形式 | 优 | 中等 | 小刚度的弹簧能提供更高的地面贴紧力,减震适应性更好,浮动过程驱动单元姿态不变,可消除铰接摆动式结构驱动轮受扭问题 | 结构复杂,空间占用相比较铰接摆动式大一些 | 载重,空间较充足的轮系布局 |
四边形式浮动结构在浮动过程中姿态不会发生改变,其驱动单元与安装座间的力始终共线。
四边形式浮动结构对竖直方向的空间要求较大,其结构相比铰接摆动式结构复杂,此类结构一般应用于叉车式 AGV 的立式舵轮以及差速驱动中。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号