仿真技术为驭势科技无人驾驶的研发测试与商业化落地打造了一个“平行世界”,通过这个“1:1”复制现实物理场景的“平行世界”,无人驾驶算法的研发测试得以更加高效、更低成本并且绝对安全的方式进行,从而实现无人驾驶经验的快速积累,提升无人驾驶技术的安全性与可靠性。

无人驾驶仿真实景建模技术起源
从某种程度上而言,无人驾驶仿真就是一款专门为无人驾驶算法量身打造的“赛车游戏”,如同游戏玩家竞技通关、获得奖励一样,如果无人驾驶算法能够在仿真“游戏”中“通关”,那么则意味着这套无人驾驶算法将获得在现实物理世界上路的资格。但从虚拟世界跨越到真实世界的过程依然是危险的,我们如何保证在仿真场景中可以“大杀四方”的无人驾驶算法,在现实世界中也能一样游刃有余,这就对仿真本身的真实度与可靠性提出了绝对严苛的要求。
无人驾驶仿真的核心在于“真”字,一套完整、可靠的仿真系统,必须具备有高度拟真的车辆动力学模型和多传感器模型、丰富且逼真的场景、真实可信的测试案例并且具备高精度的实时动态性能。如果在以上任意一个环节上出现较大失真,那么都会让仿真失效,从而让仿真结果变得不可信。为此,驭势科技自主研发打造了一套基于UE4的无人驾驶仿真系统——驭势玲珑,并在仿真系统的各个环节上构建、储备了强大的技术能力与资源,从而支持驭势无人驾驶技术与商业解决方案实现快速落地。

在面向客户交付的真实商业项目中,为了提升项目部署与验证效率,并最大限度地发挥测试用例的保真度,最有效的解决方案就是搭建一个“1:1”真实还原项目实际场景的虚拟仿真场景,也就是说,我们直接将远在千里之外的场景通过实景建模技术,“复制”到办公室的计算机里,然后进行相关的产品仿真测试与验证。
依赖于驭势科技不断研发、打磨、迭代的成熟实景建模技术与工作流程,驭势无人驾驶仿真场景,从局部细节到整体环境,其美术表现已经可以达到“以假乱真”的照片级水平,这也为无人驾驶仿真提供了坚实可靠的基础。
以下部分,我们将以驭势最新开启的全球首个机场无人驾驶物流项目为例,对实景建模技术与流程进行剖析、探讨。
实景建模技术在真实项目的应用
1. 基于实景测绘数据的场景建模流程
以实景建模技术进行仿真场景制作的第一步是取得真实场景的测绘数据,我们对香港国际机场的无人驾驶运行场景进行了大量的实景测绘,获取了丰富的场地三维点云信息和高清图像数据。通过这些数据,美术人员对场景进行拆解,分析其中的建筑、物件、植物等模型元素,并罗列统计出需要制作的模型文件。针对不同类型的模型,美术人员采用不同的方式在DCC软件中进行建模、绘制与贴图。
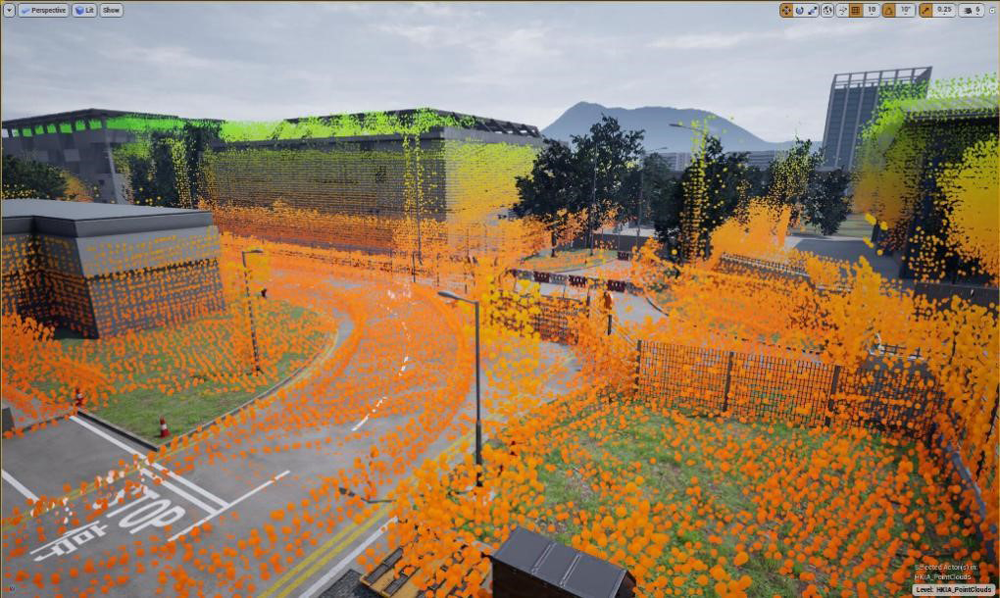
图:激光点云辅助场景还原
在完成所有的场景模型制作后,便进入场景整合阶段。我们将三维点云数据导入到UE4中,这是辅助我们对现实场景作“1:1”高精度还原的关键。最后,我们还会根据项目所在地的经纬坐标位置,实现不同时间下的光照模拟。


图:真实场景与仿真场景对比












 粤公网安备 44010602004358号
粤公网安备 44010602004358号