
CoSTAR成员及加州理工学院的研究生Amanda Bouman操纵着一个名为Spot的机器人
该机器人由Boston Dynamics提供
无论机器人是在探索其他星球上的洞穴还是地球上的灾区,自主性都使他们能够在无需人工指导或使用GPS的情况下导航到极端环境。
由美国国防高级研究计划局(DARPA)赞助的地下挑战赛SubT于2020年2月27日结束了其第二轮巡回赛。竞赛的第一名是由美国航空航天局喷气推进实验室领导的CoSTAR团队。
SubT比赛分为四轮,用时3年。每个报名的团队都对机器人进行编程,以在复杂的地下路线导航。去年八月举行的第一场比赛在一个矿场举行。在最近的一次名为“ 城市巡回赛”的比赛在华盛顿州埃尔玛市一座未完工的电厂中进行。
比赛要求机器人搜索20个预定目标,发下1个目标得1分。在城市巡回赛中,CoSTAR获得了16分;由卡内基·梅隆大学(Carnegie Mellon University)领导的探险家(Explorer)以11分排名第二。
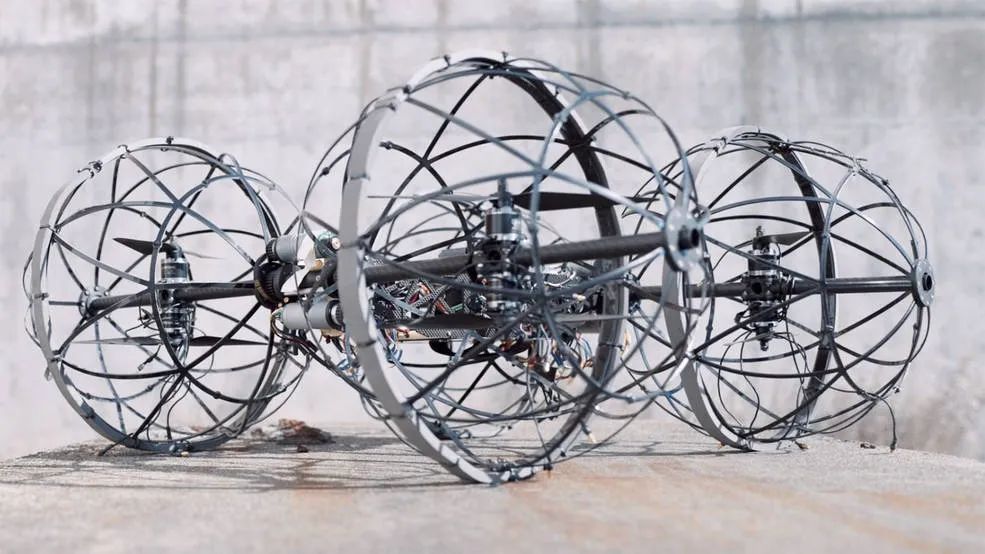
CoSTAR团队的Drivocopter滚动/飞行机器人
“我们的目标是为机器人开发软件,使他们能够在遇到意外时决定如何继续前进,” CoSTAR团队的JPL负责人Ali Agha说。这些机器人具有高度的自主性,并且在很大程度上无需人工干预即可做出决策。”
CoSTAR也带来了可以滚动,行走或飞行的机器人,具体取决于它们遇到的情况。一路走来,机器人必须绘制环境地图并找到诸如像人类一样具备体温的目标,该目标可以模拟灾难幸存者或丢失的带有Wi-Fi信号的手机。这个旨在模拟城市环境的特殊课题,包括二氧化碳泄漏和温暖的通风孔。

CoSTAR团队的Husky UGV机器人
加入波士顿城市巡回赛的团队还有一个名为Spot的四足机器人,该机器人由Boston Dynamics提供。加州理工学院教授兼JPL研究科学家乔尔·伯迪克(Joel Burdick)说:“我们必须应对的两个课题中有一个是多层结构的,波士顿动力机器人在楼梯上的表现非常棒。” 他是CoSTAR团队加州理工学院校园部门的负责人。
随着机器人的探索,他们将视频和数字地图发回给主控人,他们在整个过程的前100英尺(约30米)内保持无线电联系。他们可以通过途中丢弃通信节点(一种无线中继器)来增加通讯范围。
CoSTAR团队演练视频
失去联系后,由每个机器人决定是继续还是回溯以更新团队。每个人还必须依靠其他机器人来完成不同等级水平的课题。例如,轮式机器人可能会要求四足机器人爬楼梯或下楼梯。
Agha说:“这些课程非常非常具有挑战性,而且大多数困难在于与机器人超出范围后进行通信。” “这对NASA至关重要:我们希望将机器人送入月球或火星上的山洞中,在那里他们必须自己探索。”
在月球或火星上绘制洞穴可能会为未来的宇航员找到好的避难所。此外,外星生物生命如果存在的话,诸如Europa,Enceladus 和Titan等行星, 其在星球表面以下或冰冷海中的生存的机会更大。NASA希望在这些地区进行寻找,而这些地区机器人是经常失去联系的。
地下挑战赛的下一轮比赛将于今年八月在一个未公公布的天然洞穴网络中进行。包含隧道,城市环境和自然洞穴的最终巡回赛将于2021年8月举行。参加最终决赛的团队将有机会赢得DARPA高达200万美元的资助。

CoSTAR团队












 粤公网安备 44010602004358号
粤公网安备 44010602004358号