上月,全球机器人领域最顶尖会议之一IROS(International Conference on Intelligent Robots and Systems)在中国澳门举办,蓝胖子机器人研发总监王涛作为第一作者发表1篇Late Breaking Results Poster。
IROS设有Late Breaking Results Poster展示环节,专门针对最近有好的研究结果,但来不及发表正式论文的情况。作者可以先带上Late Breaking Results Poster去现场跟大家交流,后续可基于该poster写正式论文。
此次,王涛发表的poster题为《Design a Dexterous Hand for the Logistic Robot in Bin Picking》(针对物流领域bin picking问题的灵巧手),围绕物流机器人的应用场景展开,介绍了机器人在执行抓取任务时遇到的困难,并简明扼要地描述了解决方案的基本思路以及硬件设计。
以下为poster正文:
摘 要
随着技术发展和行业需求的增长,物流机器人现已成为一个蓬勃发展的领域。尽管物流应用场景比传统工业应用场景要求的精度低,但是目标物体的多样性增加了任务的复杂性。其中,bin picking场景就是挑战之一。本文旨在设计一种灵巧手,可以帮助解决或减少此类问题。本文将简要介绍蓝胖子机器人解决方案的基本思想,并提供可能的硬件解决方案设计。我们计划在不久的将来为学术研究和工业应用提供价格合理的灵巧手。
介 绍
在分拣场景中,对于操作员来说,bin picking是一项普通的任务,但是对于机器人自主操作仍然是一个复杂的问题。以亚马逊机器人抓取大赛为例,比赛任务越来越接近实际的分拣问题,每一季的获胜者都有不同的解决方案,尤其是在末端执行器的部分。第一届竞赛吸纳了很多想法来解决该问题,末端执行器的设计多样化且复杂。但是,在吸盘展现出良好的抓取能力之后,人们开始放弃部分种类并以更简单的方式解决问题。随着需求的变化,末端执行器再次变得复杂,吸盘和平行夹持器的组合使机器人能够处理更多种类的物品。
软件和硬件的结合推动了技术的发展。我们尝试在这个节点对硬件部分进行改造。
需求分析
吸盘在抓取具有气密性、体型大且密集的物品上具有很大的优势。但是,实际场景需要更高的PPH(每小时抓取件数),吸盘吸附所产生的摩擦力无法满足高速运动的加速度需求。
作为传统解决方案,平行夹爪的优点是可以更稳定地抓取物品,并且可以适应大多数具有不同形状和表面的物品。没有空间限制,平行夹爪几乎可以实现灵活和稳定的抓取。
吸盘和平行夹爪的组合似乎是一个不错的选择。但是相比之下,人手在狭窄的空间两个手指就能有效地抓握不同种类的小物件。因此,我们决定选择类似人手的方式,将末端执行器设计成具有2个全驱动自由度的手指,它能提供更多的规划选择,并支持更精细的操作。
▲ 图1 Use dexterous hand in bin picking
设计与分析
基于使用灵巧手的基本思想,我们开始了手的设计并分析了可能的抓取策略。A.手指设计
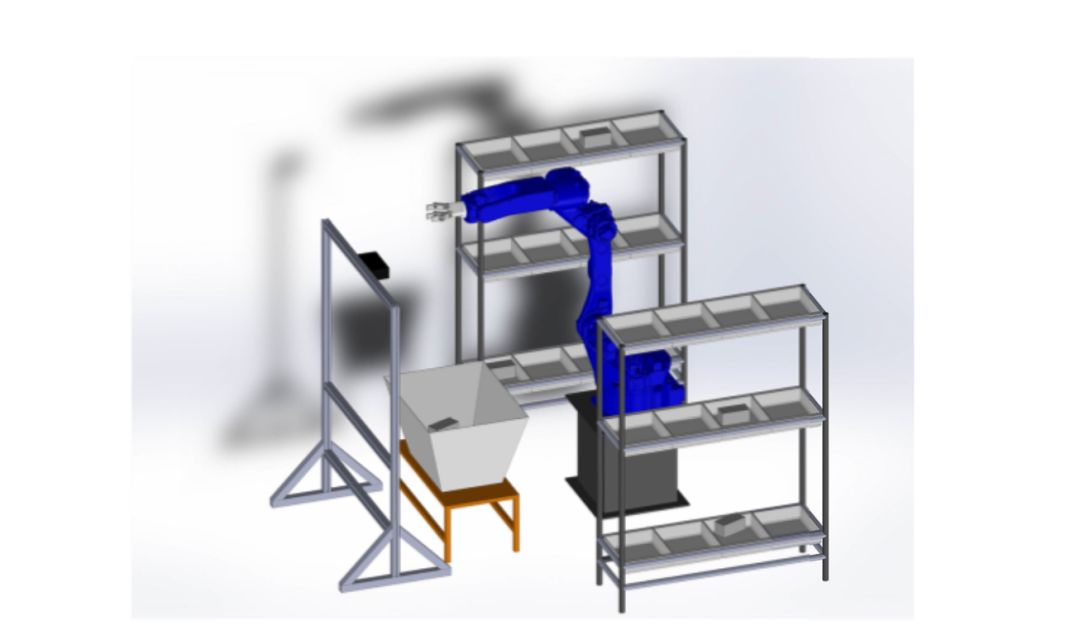
根据日常生活中物品的大小,我们确定与人的手相似的抓取范围。从模块化设计的思路,可以通过组合搭配成图2中不同数量手指的灵巧手。手指模块的一个特点是指尖应该足够薄,这可以使手指伸入空间狭小比较难抓的地方。所有的手指关节都将配备触觉传感器,用于实现稳定抓取。
▲ 图2 Dexterous hand two fingers and three fingers version design
B.抓取策略
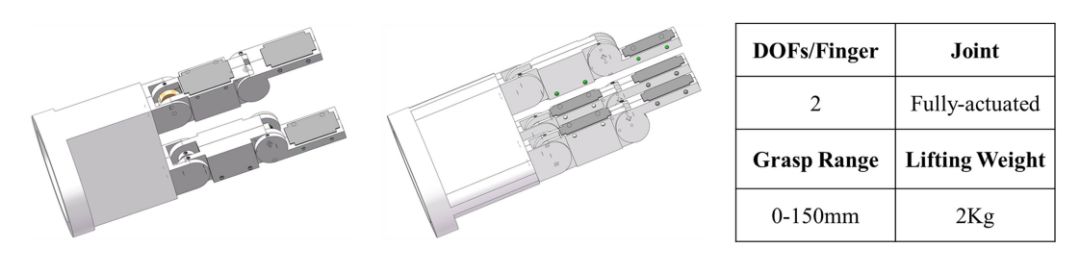
在一些复杂的场景中,例如角落里的物品,机器人会尝试像人类一样抓取。一根手指中的2个自由度提供了可变方向的抓取力输出。
借助足够的自由度和触觉反馈,机器人可以将物品从角落推开,或者使物品绕着箱内的接触线旋转,如图3所示。这些问题可以用类似的方式简化,并且概括为不同的情况。
▲ 图3 Use dexterous hand to grasp item in the corner

▲ 图4 Dexterous hand with mobile robot
结 论
Poster讨论了末端执行器在bin picking问题中的基本需求,并确定了这类型灵巧手的一些基本特征。当前,蓝胖子机器人这款灵巧手可以实现基本的运动控制,将进一步在真实的bin picking场景中进行测试,并最终应用于实际的物流抓取场景中。

▲ 蓝胖子机器人研发总监王涛向来宾讲解
大会期间,王涛同时受邀在Manipulation through Contacts: Bridging the Gap between Research Community and Industry研讨会上发表演讲,题为《Stable Grasping in the Field of Logistics》(物流领域的稳定抓取),向听众介绍了物流机器人在执行抓取任务方面的案例,并分享了未来公司灵巧手的研究方向。

▲ 王涛在研讨会做技术分享

▲ 研讨会会后大合照
据悉,今年是IROS会议首次在中国澳门举办,吸引了约4000名来自世界各地的机器人、自动化系统及人工智能等领域的领军人物、顶尖研究团队代表及企业界人士等。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号