一、引言
自从第一幅综合的全球海底地形图发布以来,海底地形数据成为全球海洋研究特别是海洋地质研究的重要参考。近年来,随着水深测量技术的不断发展及科考项目的实施,全球海洋海底地形数据得到进一步更新的同时,热点海域的海底地形也获得精细的测量和研究。特别是针对深海海底发育的特殊地质现象,如洋中脊、海山、热液冷泉、海底峡谷等,高分辨率海底地形的测量不仅为认识这些现象提供了直接的途径,也为深入研究这些地质现象提供了必要的基础资料,进而帮助我们更好地理解地球动力演化、深海生态系统以及海底沉积过程。特别是ROV和AUV应用技术的快速发展,使得我们能够更近距离地观测海底现象,这拓展了我们的研究区域并促进了深海研究的进一步发展,一些重点研究区海底地形的分辨率已经达到了亚米级。然而由于技术水平的制约,我国的相关研究起步较晚,特别是高分辨率地形数据较为缺乏,影响了我们对近海底特殊现象的深入理解。
一般来讲,在深海海域,船载多波束系统所获得的海底地形数据的分辨率最高可以达到50m。由于船载多波束测量系统拥有较宽的覆盖率和高效的测量方式,目前是大面积水深测量的优先选择。但在某些重点研究区域,由于一些海底地质现象如冷泉、热液系统发育的范围较集中,数十米分辨率的数据难以精细描述热液或冷泉发育区的地形,不能为深入的研究目标提供精确指引。因此,有必要根据研究目标进一步确定重点典型研究靶区进行精细测量。本文阐述了基于ROV近海底测量高分辨地形的方法,通过2015年5~7月在西太平洋马努斯盆地的实践和应用,获得了PACMANUS热液区的高分辨率地形并进行分析。
二、研究区概况
马努斯海盆位于西太平洋俾斯麦海的东部(图1),巴布亚新几内亚的北部,是一个快速扩张的弧后盆地,平均水深2000m。本文的研究区位于东马努斯盆地,位于Weitin转换断层和Djaul转换断层之间,是一个岛弧张裂区,该区域扩张速度可以达到137.5mm/a,是俾斯麦海中扩张速率最高的区域。该区域发育了多个热液区,包括Vienna Woods热液区、PACMANUS热液区、DESMOS热液区和SuSu Knolls热液区,是研究现代海底热液系统的典型区域和热点区域。
自从该区域的热液区被发现以来的20多年间,研究者通过获得的一系列沉积物、岩石、海底环境参数等数据,对该区域的活动热液系统在地球化学、岩石组成、热液过程等方向做了详细的研究。然而,这些研究多局限在地球化学等专业领域,对研究区地形的细节少有关注,尽管这些资料是进行深入研究的重要基础。目前,针对该区域的精细地形地貌的报道也极少出现。船载多波束测量是测量海底地形的有效手段,但受船速等因素的限制在深海区域其分辨率最高仅有数十米,远不能达到精细描述特定靶区地形特征的目的。由于技术手段的制约,我国多采用船载多波束或深拖的方式进行地形测量,2007年中国大洋调查航次在西南印度洋脊利用美国伍兹霍尔研究所ABE水下机器人进行了热液区的地形测绘,然而,目前为止尚未有基于ROV的深海小靶区(如热液区)近海底高分辨率地形测量及分析的相关研究报道。
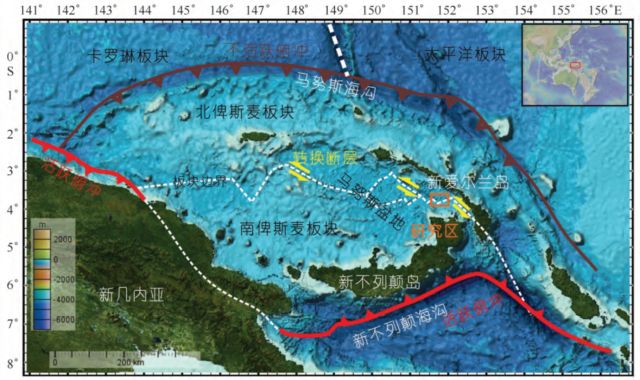
图1研究区位置
三、基于ROV的近底地形测量方法

深海小靶区的高分辨率地形数据是基于船载多波束实测数据,并最终利用ROV或AUV搭载多波束系统进行近底测量来获得的(图2)。2015年5~7月,受中国科学院先导专项项目资助,中国科学院海洋研究所于2015年5~7月在马努斯盆地研究区利用“科学”考察船搭载的多波束系统(Seabeam3012)采集水深地形数据。船载多波束测量时船的定位依靠差分GPS定位,定位精度优于1m,但是由于水深较深,波束有限,而且数据分辨率受船速和波束开角的共同影响,船速越高,波束开角越大,所获得地形的分辨率越差,获得的地形数据分辨率通常低于数十米。考虑的大面积调查的经济性,我们在研究区选择5节航速,90°波束开角进行船载多波束全覆盖测量。

图2深海小靶区选择及高分辨率地形测量
在获得地形数据后,根据实测地形在Pual洋脊顶部选取了一个近长方形区域(PACMANUS热液区)作为目标靶区,该区域面积约2km×3km,水深范围约为1641~1895m。之后利用“发现”ROV搭载多波束系统(Kongsberg EM2040)进行近底走航式全覆盖水深测量,获PACMANUS热液区的高分辨率地形数据。近海底观测时,ROV观测的方式类似于船载多波束走航式测量,不同的是ROV无法直接利用GPS进行定位,需要通过间接定位系统。此次测量利用哈尔滨工程大学研发的综合定位系统对ROV进行定位。ROV下水测量之前,首先选择目标靶区(PACMANUS热液区)地势较高的点位布放长基线信标,构建了一个长基线三角形阵,信标的标定位置见表1。在ROV进行近底地形测量的过程中,长基线为其提供定位服务。“发现”ROV同时搭载综合定位系统,该系统采用分体式安装结构,声学换能器安装于ROV艏部上方,电子舱则固定于ROV本体结构上(图3)。
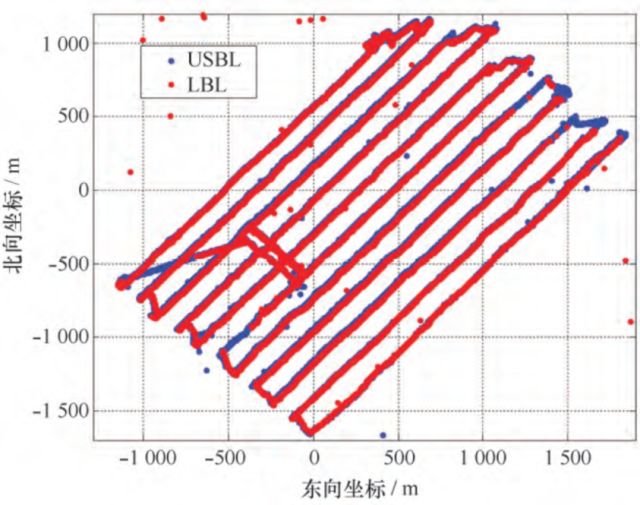
图3ROV及综合定位系统
表1 信标标定结果
|
信标编号 |
北/m |
东/m |
深度/m |
|
Beacon1 |
9587909.7889 |
351822.8993 |
1467.51 |
|
Beacon2 |
9587773.0996 |
352385.2775 |
1492.12 |
|
Beacon3 |
9588398.7002 |
352630.9577 |
1502.61 |
在测量时,测距仪通过ROV的光纤电缆与水面的超短基线部分进行时钟同步,并能够将定位结果实时通过光纤传输至ROV导航单元。该系统为ROV提供了水下长基线的精确定位和水面超短基线的跟踪服务,其内部的测距仪与水下信标相互应答,实时解算ROV的位置信息,水面超短基线采用时钟同步方式检测测距仪的询问信号,完成对ROV的定位和跟踪。ROV测量航线间距150m,距底高度40m进行测量,自身动力驱动且能保证其姿态相对稳定。在近底多波束测量过程ROV航迹线如图4所示。
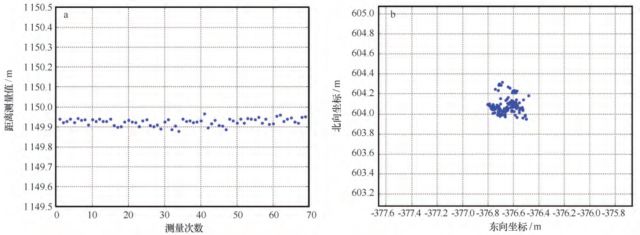
图4ROV定位轨迹
a.测距精度;b.静态定位精度
图5定位精度评估
为了验证其定位精度,进行了静态定位试验,在ROV悬停状态下,重复测量与信标的距离,获得其数据偏差。经过数据验证和评估,长基线测距精度达到1.8cm(图5a),ROV静态定位精度优于0.2m(图5b)。本次测量采集的原始水深数据由Caris HIPS8.1进行姿态校正和异常点剔除,处理后输出散点数据,通过UTM投影(UTM 56度带)进行坐标转换,结果数据在网格化之后在Surfer中成图。
四、结果与讨论
⒈ 海底地形船载测量与近底测量的结果对比
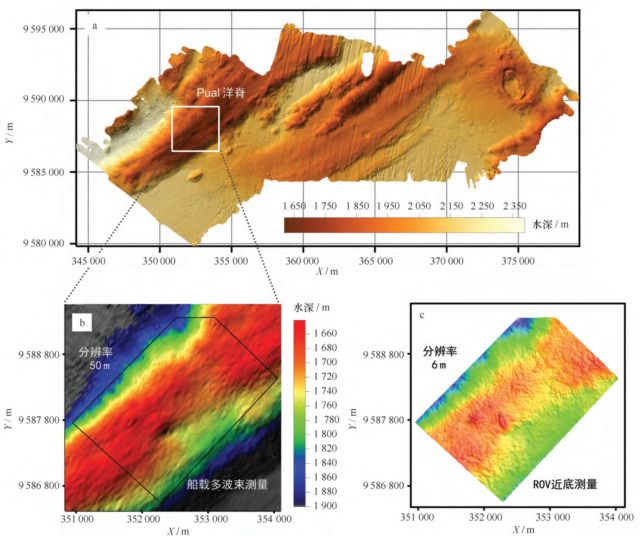
“科学”考察船搭载的多波束系统(Seabeam3012)在5节航速,90°波束开角测量2000m水深时的数据最优横向分辨率优于40m。利用此船载多波束的测量数据,通过网格化之后,获得了分辨率为50m的海底地形(图6a),结果显示,研究区内发育多个东北-西南走向的洋脊,其中规模最大的为Pual洋脊。Pual洋脊地形西北侧较陡,坡度最大可达40°;东南侧呈阶梯状,底部的坡度最大也可达40°;顶部相对较缓,大部分区域坡度小于15°。
虽然通过此数据可以分辨洋脊等大尺度地形及其分布,但无法区分小区域的精细地形。如图6b所示,小靶区水深约为1600~1900m,地形西北侧陡东南侧缓,顶部呈马鞍形,南北两侧地势较高,但却无法辨别地形的精细特征。相比之下,长基线定位精度高,且ROV近底测量(距底约40m),获得水深数据横向分辨率优于1m,通过数据网格化之后获得6m网格的地形图(图6c),该高分辨率地形图不仅显示了靶区的地形变化,也容易辨别该区域的复杂特殊地形,如发育于靶区中部的锥形地貌。因此,通过对比,可以看出ROV近底测量获得的地形分辨率可以数十倍优于船载多波束获得的数据,在获得小靶区高分辨地形方面有极大优势。然而,尽管船载多波束测量地形分辨率相对较低,在典型小靶区圈定及大面积海底地形测量中,船载多波束测量仍是必不可缺的重要基础。
a.船载多波束测量的研究区地形图;b.目标靶区船载多波束测量结果;c.目标靶区ROV近底测量结果
图6船载多波束测量结果与ROV近底测量结果的对比
⒉ PACMANUS热液区的高分辨率地形地貌特征
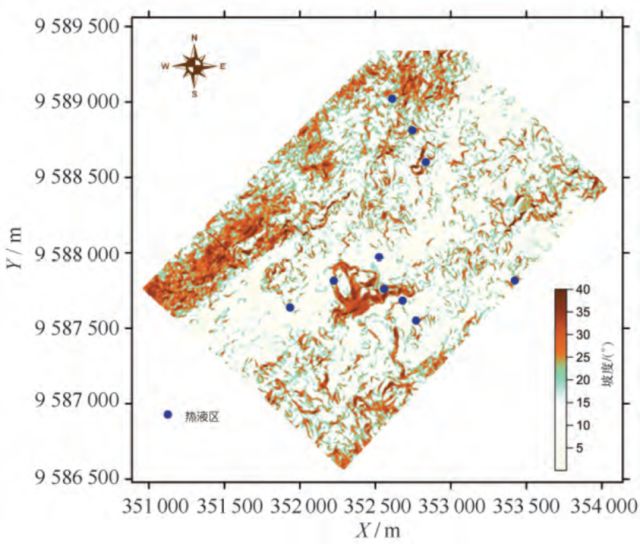
图7清晰显示了该区域的复杂地形特征,受火山作用及海底熔岩分布的影响,海底表面崎岖多变,地形复杂。研究区中央地形相对平缓,坡度小于15°,西北侧坡度大于40°(图8)。测量结果显示,研究区南部和北部地势较高,中部偏北区域发育一个垂直于洋脊走向的低地,中部发育了一个新生的火山区,面积约500m×1500m。该新生火山区域是一个椭圆形区域,主要由3个丘状地貌构成,火山区南部发育两个小型火山口,最南侧火山口的环形坑直径约50m,最大深度约20m,中部火山口的环形坑直径约70m,深约5m。前人观测表明该区域热液溢出口和烟囱主要分布于中部的Snowcap、Fenway、Satnic区域和北部的Roman Ruins、Roger′s Ruins区域(图7)。这些热液喷口主要分布在火山区的两侧的斜坡处,其中有两处热液喷口能够在高分辨地形图上辨识出来。在火山区的东侧边缘,发育一个突出的圆锥形地貌,与周边地形高差可达40m,锥体中央下陷,对应于活动的Snowcap热液区。另外,在北部低地也发育一个长形的小型丘体,与周边地形高差约20m,对应于之前发现的Roman Ruins热液区。
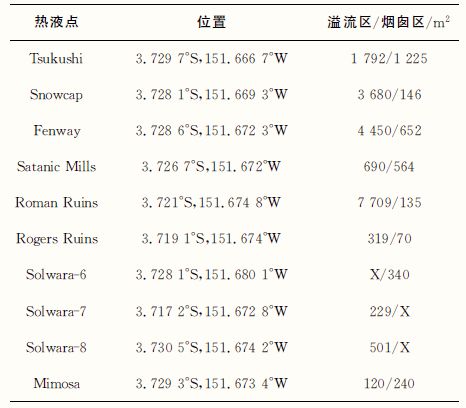
图7PACMANUS热液区高分辨率地形图及热液点位置
(分辨率6m)
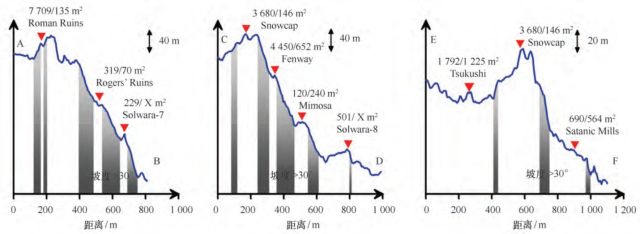
图8PACMANUS热液区地形坡度图
⒊ PACMANUS热液点分布与地形变化的关系
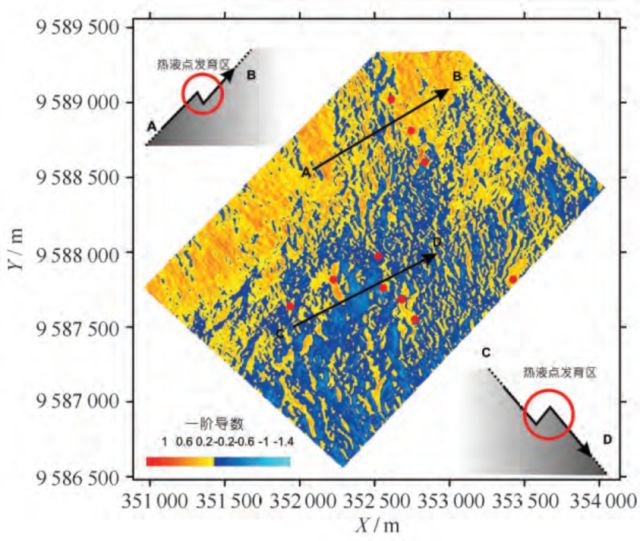
研究区海底地形的变化与热液活动可能相互影响。热液点溢流区和烟囱区的发育面积(表2)表明,热液活动在地形高点发育更为广泛,已发现的热液点中多数既有烟囱体也存在低温溢流口,而且距离火山区更近的Tsukushi、Snowcap、Fenway和Satnic热液点热液活动更加强烈,溢流和烟囱更加发育;相对的,在距离火山区较远的斜坡底部,Solwara-7和Solwara-8热液活动最弱,烟囱体未发育(表2)。另外,该区域活动热液点主要分布在火山区两侧斜坡的阶地上,而且在热液点发育的区域海底局部坡度超过30°(图8,图9)。进一步对研究区地形进行一阶导数计算获得定向坡度的分布,发现热液点主要位于斜坡上的地形突变区,这些斜坡上地形突变可能是由断裂、火山活动或热液活动本身导致,但基于目前的资料无法确定其成因,相关研究需要进一步开展。目前对该区域热液活动的控制因素仍有争议,Binns等认为该区域的热液流体活动主要受断裂控制,然而最近的研究认为热液活动可能与该区域的火山活动有关,与火山附近沉积结构的相关性更为显著,因为对该区域的调查未在海底发现显著的断裂现象。值得注意的是,在火山区两侧平行的相同方向上,地形的变化是相反的(图10),即火山区西北侧向西南方向倾斜,而火山区东南侧向东北方向倾斜,这可能与构造活动有关。
表2 PACMANUS主要热液点的位置及分布面积
注:X为未发现。
剖面位置见图7,图中面积为溢流区/烟囱区的发育面积见表2,X为未发现
图9热液点地形剖面
正值表示上坡,负值表示下坡
图10定向一阶导数的分布特征及与热液点发育区的关系
五、结论与展望
⑴基于ROV搭载多波束对西太平洋马努斯盆地PACMANUS热液区进行了近海底全覆盖地形观测。研究证实,在测量过程中,长基线系统定位精度高,能够保证ROV位置的准确性。由于是近底测量,在测量高分辨率地形时,ROV测量的优势极为明显,测量的地形分辨率数倍优于船载多波束观测结果。然而,虽然船载多波束测量精度较低,船载多波束测量仍是获得大面积海底地形的首选,也是目标小靶区选定的基础。
⑵高分辨率地形显示PACMANUS热液区南部和北部地势较高,中部偏北区域发育一个低地,中部发育了一个新生的火山区,一些锥形地形对应了之前发现的多个热液点。通过分析发现PACMANUS热液区的热液点主要发育于坡度大于30°的斜坡的地形突变区域,其原因仍需进一步深入研究。
⑶深海海底发育了特殊的地质现象,对深入认识地球演化及动力过程、海底环境等研究有重要意义,针对重点的特殊深海研究区(如热液冷泉、洋中脊区域),在船载多波束数据获得研究区大面积地形资料的基础上,有必要选取多个典型深海小靶区进行高分辨率地形测量为进一步深入研究提供保障。其中,ROV搭载多波束测量为其提供了可靠有效的途径,应得到进一步更为广泛的实践应用。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号