1. 概要
KR参与了”高信赖性无人船运用技术及基础构建”课题(2015~2020),对无人机实用化开发基本标准。在进行本次研究时,对无人船系统适用目前的型式认可流程进行了审核,其审核结果是为了无人船的安全应用,需要额外考虑到下列事项。
- 综合系统中工作有效性的验证(型式认可的极限)
- 先行阶段的软件验证(在制造商的观点中防止非生产性的损失)
- 型式认可以后综合性能评估方案
2. 综合系统中工作有效性的验证(型式认可的极限)
型式认可是制造商想取得按照成品制造的船用材料及机器等认可时实施的,而相关机器的认可本身不保障船舶的安全性。因此取得型式认可之后,为了无人船的安全运用,需要额外对综合系统进行完工试验,船上试验以及海上试验。
3. 先行阶段的软件验证(在制造商的观点中防止非生产性的损失)
适用无人船的综合系统复杂程度越高,软件层面上发生错误的频度就会增加(个别系统在进行整合的过程中发生内部错误)。对这些错误进行试航中全部验证是有限的,因此需要测试综合系统故障及误操作的验证体系。
另外,事先没有验证软件的状态下,在FAT(Factory Acceptance Test)阶段由System integrator确认软件的体现,进行综合测试(寻找错误的试运行)时,会根据错误的发生产生非生产性损失(费用/时间)。
因此不是在无人船建造工程后期,而是在先行阶段就开始进行验证,有必要使软件的错误最小化,工程最小化。
当无人船综合控制系统的软件验证由System integrator来执行时软件Code需要在没有公开的环境下进行验证,并且考虑上述测试环境的制约条件时,认为具有黑匣子测试性质的HIL(Hardwarein-the-Loop) test可以安全,有效的对软件进行验证。
- 安全性及提高质量层面上可以确保广泛的测试范围:危险最小化,可以进行严酷环境的测试
- 系统开发日程最小化:缩短试运行时所需的验证阶段,能够验证并确认开发初期的要求事项。
但是无人船于目前造船海洋领域自动化系统软件验证不同,不仅要求为了验证控制技术的动力学模型,还要求为了验证认知技术和判断技术的传感器及环境模型。
为了验证无人船的认知技术及判断技术,需要通过可以组成环境模型的软件,考虑有可能发生的各种危险情景组成交通环境。

测试情景组成事例(无人汽车)
(AutoJournal, 2015)
下一步在开发初期系统设计阶段利用没有错误的理想传感器模型,进行自主航行系统的技能验证。根据需求对理想传感器模型增加概率性的误差对传感器建模。
验证了开发初期展现的算法一般技能以后,再以反映实际传感器模型特性的物理性传感器模型(适用各种恶劣条件,高色彩度等基于实际影像的物理模型),实施对综合系统的验证。
※ 目前开发和验证自主航行技术都不太容易。但是一般情况下,无人船会设计成当超过运用环境极限时,实行事先定义好的安全流程。通过构建传感器及环境模型,认为可以对船舶目前处于黄泉情况下的事实由系统自我认知的功能及转换成安全模式状态的功能进行事先验证。
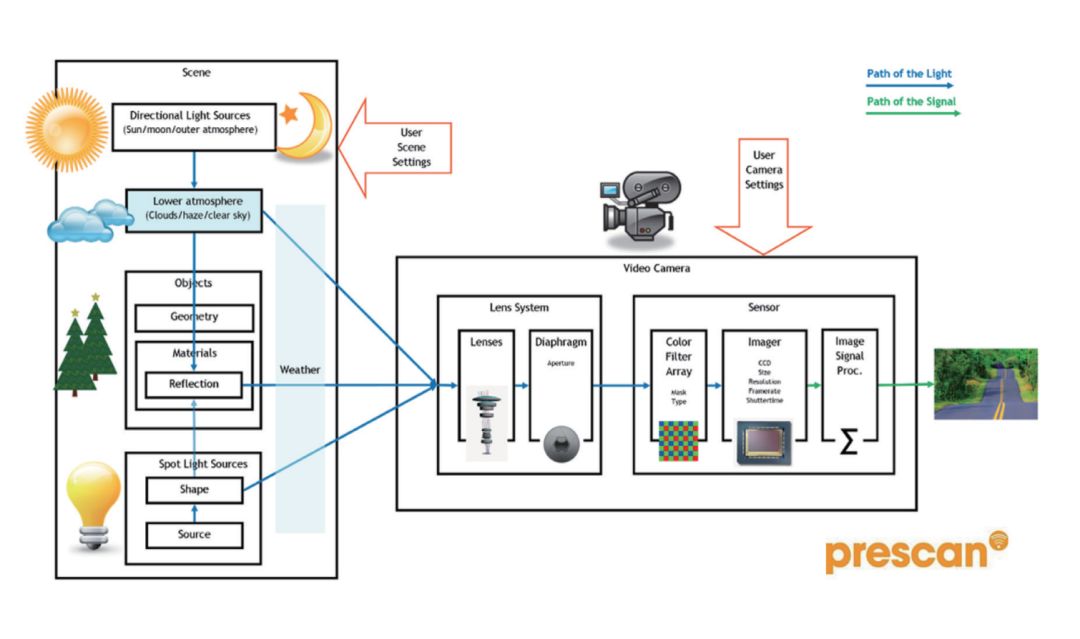
物理基础摄像机传感器模型的例子
RGB 基础摄像机传感器模型 vs 物理基础摄像机传感器模型 (赵红, 2015)
|
目前RGB基础摄像机传感器模型 |
物理基础摄像机传感器模型 |
|
简单的功能验证 仅在RGB基础的可视光线范围内进行模拟 不支持HDR(High Dynamics Range)模拟 一般性机械构想算法只使用光的强度(Intensity) |
各种恶劣条件下的验证 可以在可视光线范围内像紫外线一样的各种波长下进行模拟 支持HDR模拟 高色彩度 扩张代替实际摄像机影像的HIL |
4. 型式认可以后的综合性能评估方案
像无人汽车通过有公信力的机构为了确保安全性,构建了展现各种实际道路环境的评估用试验道路,并通过这个实施成品车的综合安全性评估(可以反复展现的标准化的安全性评估)。
构建无人汽车实际道路评估用试验台(国土交通部, 2016)
|
区分 |
美国(M-City) |
日本 |
中国(Nice City) |
大韩民国(K-City) |
|
构建年度 |
2015年 |
2016年 |
2016年 |
2018年 |
|
运营机构 |
密歇根大学
|
日本汽车研究所(JARI) |
上海国际汽车城有限公司 |
汽车安全研究院(KATRI) |
|
构建费用 |
大约 135亿 韩元 |
大约 372亿韩元 |
- |
大约 100亿 韩元 |
|
面积 |
13万㎡(大约 3.9万平) |
15万㎡(大约 4.5万平) |
500万㎡(大约151万平) |
36万㎡(大约 11万平) |
|
特征 |
在学校地基上构建另外的试验城市 再现由道路,建筑物,交叉路,人行横道,地下车道等组成的城市部分和由石子路,铁道口,4车线道路等郊外部门 运营会员车等 - Leadership Circle (目前拥有18个会员公司) - Affiliate Membership(目前拥有44个会员公司) |
由建筑模型,道路,无线通信扰乱设备等组成 在日本汽车研究所(JARI)管辖区域构建了另外的试验城市 |
嘉定汽车公园同济大学嘉定院校一带组成15km的试验道路 在智能网联车辆上提供29种测试环境 预计将在2019年,扩大至100㎢规模的智能网联汽车综合城市示范区 |
运营14个试验道路(修建,65万平) - ITS试验道路(市街道及国道等的再现 - 可以进行无人汽车连续行驶试验 构建5个交通环境(城市中心部分,交流部分等) |
|
构成图 |
|
|
|
|
但是对于无人船不同于构建定型系统的道路,根据气象变动幅度较大,人为对环境调整较困难的海上运营的难点,系统适用船舶规模从小型船至大型船范围非常大,并且有可能要求远程通信控制验证等理由,很难构建像无人汽车评估用试验道路一样的标准化框架的试验平台。
因此目前像第2节所述,在先行阶段通过充分的软件验证,在系统整合过程中有可能发生的错误和试运行时有可能错过的错误进行更深层的审核之后,对相关无人船舶指定的运行环境及有可能发生的危险情况,在无人船测试专用海域上进行实船试验,对要求的信赖度进行审核的方案是最现实的代替方案。
※ 在挪威,由无人船开发者(NTNU, Kongsberg, MARINTEK,Maritime Robotics 等)主导2016年在Trondheim,2017年在Horten准备了无人船试验及试航的正式测试海域,对具有自主航行功能的无人船进行实证试验。

(a)

(b)

(c)
正式指定测试海域(a : Trondheim / b : Horten)及试航案例(c)
参考文献
- KR, 钢质海船入级规范(电气设备及控制系统,附加设备(自动化设备))
- KR, 工厂认可及型式认可等的指南
- Lloyd’sRegister (2016), ShipRight Procedure - Autonomous Ships, Cyber Enabled Ships
- Lloyd’sRegister (2017), Design code for unmanned marine systems
- Ø.J.Rødseth et al. (2015), Risk Assessment for an Unmanned Merchant Ship, TRANSNAV
- WilkoC. Bruhn et al. (2014), Conducting look-out on an unmanned vessel, Introductionto the advanced sensor module for MUNIN’sautonomous dry bulk carrier, ISIS 2014
- 国土交通部(2016),自主驾驶汽车安全性评估技术开发及实际道路评估环境构建的详细计划报告
- 李光国 (2015),提高船舶/海洋平台生产性及品质的HILS技术,大韩造船学会52(4)
- 赵红 (2015),为了支援自主行驶技术开发的MiLS基础验证技术,Auto Journal 2015-10
















 粤公网安备 44010602004358号
粤公网安备 44010602004358号