
无人水下航行器 (UUV)
遥控和自主车辆现在正帮助我们在人类不容易到达的地方进行发现。最近在美国夏威夷和墨西哥之间的克拉里昂-克利珀顿区的底部探索海洋生物的任务,最深的地方在地表下5000多米,发现了30多个潜在的新物种。
这些无人驾驶的水下航行器(UUV)正在执行任务,使人类能够做出更好的决定(克拉里昂-克利珀顿调查是为了评估海底采矿的影响)。它们也在对未知的深海进行测绘,按照下潜前设计的轨迹和任务指令,然后在离海底几米的地方 "飞行 "几个小时,同时将数据转发给上面的船只。这些只是两个例子;车辆可以被编程为寻找埋在海底的旧海雷,检查管道是否泄漏,或搜索丢失的航运集装箱。
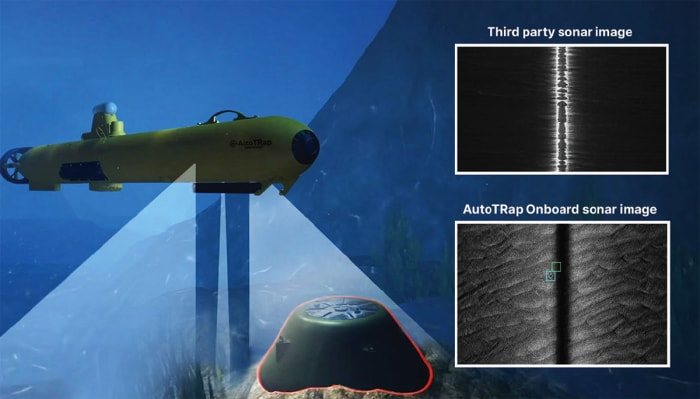
AutoTRAp Onboard™ 自动目标识别和声纳图像处理正在 Teledyne Gavia 平台上进行地雷探测测试。
问题是,现在这些自动驾驶汽车缺乏一个重要的特征——好奇心。他们执行一种模式(如割草机搜索)或收集数据并将其传递给人类以决定哪些对象是有趣的,然后被引导回这些目标。
很快这些任务将与自动驾驶汽车一起执行,作为真正的队友,机器被赋予一般任务指令和搜索区域,然后被释放去探索并决定需要进一步检查的内容,而不是需要远程控制或保持联系以获取指示。
好奇的机器可以修改他们的任务以获得更多信息。他们不只是确定目标;他们可以意识到他们找到了一种新的目标。他们知道的足以说,‘那看起来有点像海星,但它不是我所期待的。我需要知道更多。当然,机器并不是真的这样说话……但是。然而,最近成立的 XAI(Explainable AI)领域正在为深度学习系统提供一种声音,它们可以用一种自然且易于人类理解的方式传达其决策和行动背后的原因。
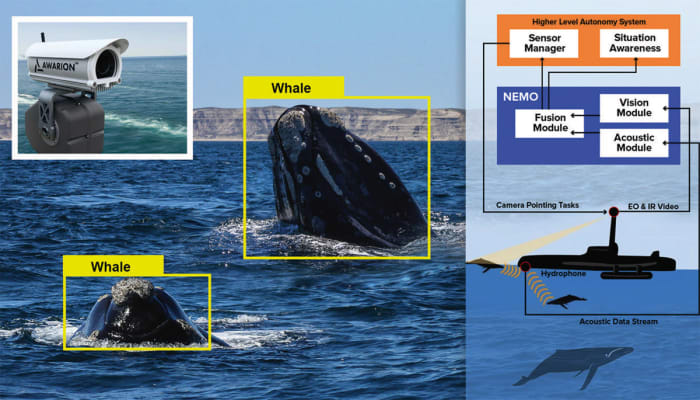
NEMO 将来自 Awarion™ 自主监视系统的信息与深度学习 YOLO 神经网络和概率数据融合方法相结合,以准确检测和分类视觉和听觉传感器馈送中的海洋哺乳动物。
自动驾驶汽车的未来意味着在从深海到外太空的未开发地点和环境中执行非常长期的任务。当他们遇到异常时,他们需要知道他们观察到的东西是新的和有趣的,然后决定靠近或跟随它以了解更多信息。
但是创造一台好奇的机器并不容易。为了好奇,一台机器必须辨别出什么是不寻常的;换句话说,它必须执行异常检测。异常检测很复杂。它需要机器感知某物(检测)并知道它是什么或不是什么(分类)。这适用于静止物体,如海底矿井,或移动物体,甚至是一起移动的物体组,如海洋生物,这可能需要观察数天或数周以收集足够的数据以确定什么是正常行为(即,生命分析模式中的基线)。
如何构建好奇心?
要成为人机团队的好奇成员,海上车辆需要在许多领域进行更先进的研发:感知、AI 算法、世界建模、导航、异常检测、人类可理解的通信等等。让我们检查一些。

ALPACA 机器学习代理不仅学习如何在户外环境中导航,它还了解自己在任务中的能力。
感知:信号处理和数据解释。视觉传感器 (EO/IR) 在水下变得不太有效,因此它们的信息必须与声学传感器(声纳、多普勒、振动计)融合。需要在机载图像处理方面取得进展,以消除诸如“海雪”之类的伪影——水下图像中悬浮在水中的粒子反射产生的亮点——这样图像就足够清晰,可以支持决策制定。所有传感器必须变得更小并且需要更少的能量来支持更长时间的任务,以全面探索一个区域或追踪物种的生活模式。
机载智能:自主、规划、情境和自我意识。我们需要人工智能和机器学习的重大转变,以融入真正的态势感知;即对周围内外环境的认识。人工智能并不能保证任务成功——人工智能的表现取决于它对环境和其中一切事物的了解,包括它自己。
为了准确识别海底图像中的某物是否值得研究,人工智能还必须知道海底类型、水柱状态以及该环境的常见情况。它还需要了解自己的性能;如果传感器出现问题,它必须低估传感器的观察结果,就像我们戴着镜片上有污迹的眼镜一样。在更高的层次上,它需要知道它在某个环境中是否有足够的经验,或者它以前在那个环境中的表现是好是坏。
所有这些信息都必须输入支持好奇行为的决策过程。决策软件,即可以让机器表现出好奇心的人工智能算法和知识模型的结合,必须能够在车载的小型、轻量、低功耗处理器上运行。
异常检测:目标检测、分类和世界建模。目标检测和分类方面的进步本身并不能确定一个物体是否异常。该判断需要一个环境模型,并了解其中的正常情况。
目前,基线参数主要由人类提供,但通过用复杂模型替换这些硬编码规则,机器可以知道,例如,水和沉积物在特定水下环境中如何倾向于混合,以及声纳返回的信息如何因此,传感器应该有不同的解释。
海底地形的世界模型开发正在进行中。像 Terradepth 这样的公司正在使用一组自主潜水器来生成一组详细的测深图,这样我们就可以在水面上方和下方使用谷歌地球。
人机协作和通信:当前的数据对接和传输方法错失了发现的机会。通过传输(甚至实时传输)原始数据供人类分析,自动驾驶汽车必须等待重新部署或被引导到一个有趣的目标。
考虑另一种选择:一台机器确定一个发现足够有趣,可以分享,所以它修改了它的行为——导航到表面,在那里它可以交流它发现的东西,然后潜回去寻找下一个新事物。为了实现这一点,人类必须信任他们的机器队友。为了赢得这种信任,机器必须知道什么时候它可能需要人类的帮助才能表现良好,并且它必须能够用人类可以理解的语言来解释它的决定和行动。
好奇心使能技术
Charles River Analytics 的科学家正在人类将好奇心编码到自主水下和水面船只所需的许多领域进行前沿研发。AutoTRAp Onboard™ 是一种目标检测和分类系统,可为 UUV 的导航系统提供对象类型、检测置信度和位置,使其能够实时处理声纳数据。Awarion™ 是一种人工智能和计算机视觉系统,带有一个摄像头,可以扫描地平线并自动寻找和跟踪物体以进行后续观察,包括鲸鱼、船只和海上的其他物体。激光多普勒测振法也正在探索用于空中、表面和地下传感。
在 NOAA 和 DARPA 赞助的项目中,正在开发传感器、检测和分类软件以支持对海洋哺乳动物的调查。学习代理意识到自己的能力和软件,可以解释人工智能如何执行分类,例如检测图像中的行人,或者它如何在游戏环境中做出决策,也已经交付。
正在使用概率编程语言 Figaro 对不确定性下的决策制定进行研究。世界建模由 Scruff 支持,Scruff 是一个新发布的框架,用于将不同的建模范例组合在一个连贯的框架中,以便它们可用于 AI 推理。在一个应用程序中,这些语言使得将“正常”软件转换为自适应软件成为可能,UUV 上的导航和路径规划软件可以使用这些软件来快速适应新的条件。
对于无人驾驶系统来说,真正的自主和值得信赖的人机队友,他们必须好奇。好奇心是一种特殊形式的智力,通过了解什么是正常的和什么不是正常的编码,具有自主性和能力来做出决定,然后执行行为以进一步调查。为了值得信赖,机器必须了解自己的表现,并就其决策和行动进行可理解的交流。一旦可以部署一批好奇的机器来服务于探索和保护,发现的速度将呈指数级增长。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号