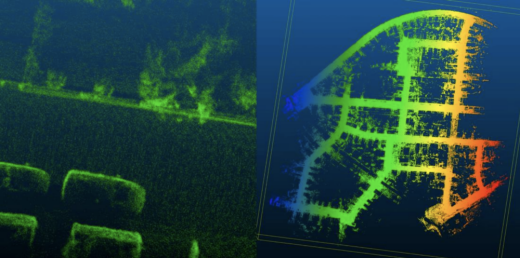
Kudan 宣布已经完成了自己的 SLAM 地图技术的开发,该技术可以生成具有超过 10 亿个点的千兆点地图。此图像是当时发布的 YouTube 视频的演示图像 。
自定位和地图构建是自动驾驶的核心技术。自主定位是自动驾驶汽车必不可少的技术,而地图对于实现高精度自动驾驶有很大的帮助。
有一些技巧可以同时做到这两点。这是“SLAM ”(即时定位与地图构建(Simultaneous Localization and Mapping,简称SLAM))。通过引入不同于标准GPS自我定位的技术,可以提高自动驾驶的准确性。
在这篇文章中,我们将根据截至 2022 年 10 月的信息,解释 SLAM 的概要和介绍示例。
什么是SLAM?
SLAM是“Simultaneous Localization and Mapping”的首字母缩写,读作“slam”。直译过来就是“即时定位与地图构建”的意思。它是一种可以同时识别位置和创建地图的技术。
使用移动物体,例如配备传感器的车辆,在移动时绘制周围环境。此外,通过传感器图像等设置任意参考点,并根据该参考点计算移动量,或者通过安装在车辆中的惯性测量单元(IMU)计算移动量,可以指定相对位置。
GPS 为您提供指向您在地球上的位置的绝对坐标,而 SLAM 使您能够在您创建的地图上精确定位您的位置。
它类似于一个人进入陌生土地四处走动并创建地图的图像。通过记忆进入视野的每个建筑物和道路来创建周边区域的地图,同时机器人可以根据步行距离和方向计算移动量来掌握自己在地图上的位置。SLAM 执行这一系列动作。
它是一种可以有效地执行自我定位和地图创建的技术,这对自动驾驶来说是必不可少的。无需GPS信息即可获得相对位置信息,因此无论在什么地方,如室内停车场、山区、隧道等都可以使用。
三种主要类型:摄像头、LiDAR 和 ToF
相机、LiDAR 和 ToF(飞行时间)传感器主要用作传感器。使用来自LiDAR的点云数据的称为“LiDAR SLAM”,使用来自相机的视频数据的称为“Visual SLAM”,使用来自ToF传感器的深度图像数据的称为“Depth SLAM”。
使用激光的 LiDAR 和 ToF 传感器擅长测量到物体的距离,并且具有很高的三维映射精度。即使在晚上也可以测量。相机信息量大,抓取物体能力强。距离也可以通过使用立体相机来计算。
另一方面,LiDAR 相对昂贵且数据密集。激光照射范围在垂直方向上较窄,如果周围物体较少,则点云的密度往往比较粗糙。摄像头虽然性价比优异,但与激光雷达相比,在距离测量和夜间测量方面表现不佳。
各有优缺点,但也可以结合使用 LiDAR 和摄像头,使用与应用相匹配的传感器配置进行定位和映射。
虽然存在数据处理时间、局部位置信息的准确性、整体地图一致性、运动物体处理等SLAM特有的问题,但通过使用传感器融合和高性能,可以在广泛领域应用的技术电脑。它已经成为。
SLAM开发公司
Kudan:提供商业级“GRAND SLAM”
来源:Kudan官网
从事人工感知 (AP) 技术研发的 Kudan,通过研发赋予空间识别能力的 AP 算法,正在加速自动驾驶、机器人、AR 和 VR 等领域的创新。
具有商业级性能的软件“GRAND SLAM”以摄像头和LiDAR作为主要传感器,还支持ToF、IMU、GNSS、车轮里程计等广泛的传感器数据。
除了实现高精度和低延迟,还可以扩展到大比例尺地图,与其他系统集成,跨平台。
2022年7月,在中国从事自动驾驶解决方案开发的鲸鱼动力宣布开始提供集成Kudan的3D-Lidar SLAM技术和相关高精地图创建工具集产品的自动驾驶送货车。
自 2021 年以来,该公司一直与 Kudan 合作。除了推出WD1多功能自动驾驶无人配送车、地图硬件套件和软件工具包,我们还在中国主要城市接到了自动驾驶项目的订单,进一步推进社会落地和技术落地。我们计划前进。
此外,开发计算机视觉技术的 Kudan 的关联公司 Artisense 似乎正在扩大其活动领域,例如参与开发可实现全自动驾驶的自我定位技术的欧洲 ERASMO 项目。
Map Four:开发3D地图制作系统“MapIV Engine”

来源:Map four官网
开发3D地图技术的Map Four正在开发汇集自家SLAM技术的3D地图制作系统“MapIV Engine”。传感器融合技术克服了 SLAM 的独特问题,据说可以利用手头的数据构建高精度的 3D 点云。
此外,该公司还发布了使用 GNSS/IMU 的位置估计系统“Eagleye”和使用 3D 地图和单目相机图像作为开源的位置估计系统“Iris”。
DMP:开发视觉SLAM软件“ZIA SLAM”

来源:Digital Media Professional官网
2021年,涉足半导体开发的Digital Media Professional (DMP)宣布将开始提供视觉SLAM技术软件“ZIA SLAM”。
除了支持用于机器人应用程序的软件平台“机器人操作系统(ROS)”的最新版本“ROS2”之外,它还确保可以在不依赖于 GPU、CPU、FPGA 等平台的情况下集成的高通用性。它说。
支持单目相机、立体相机、RGBD相机等多种相机,也可以融合IMU、GPS等传感器。
佳能:开发基于Visual SLAM的视频分析软件

来源:佳能官网
熟悉相机和打印机的佳能也在2020年通过开发基于Visual SLAM的视频分析软件进军移动机器人市场。
视频分析,包括视觉SLAM技术,通过利用以周围静止物体为标记的空间特征对齐技术,在实时融合现实世界和3D CG的MR(混合现实)研究中培育。成功将该软件投入实际使用.
预计搭载于下一代自动导引车(AGV)和自主移动机器人(AMR)等,据称已在发布的自动导引车“S-CART-V”系列中采用由 Nidec-Shimpo..
SLAM 活跃于室内外无人机和自动驾驶领域
不需要 GPS 的 SLAM 擅长在室内工作。由于这一特性,它通常用于各种服务机器人,例如商业设施中的清洁机器人和安全机器人,以及概念和仓库中的自动运输机器人。
机器人本身在目标区域内运行并绘制地图,掌握各种行驶路线。之后,在按照一定指令前往目的地时,将预先映射好的物体与摄像头等传感器实时检测到的物体信息进行匹配,在识别自身位置的同时进行自主驾驶。
SLAM 还用于无人机、测量、农业和建筑机械的自动驾驶以及道路上的自动驾驶。据说它活跃于潜艇和地外探索。
对于道路上的自动驾驶,结合使用 GPS 可以提高定位和地图绘制的准确性和冗余度。这使得它不易受驾驶环境的影响,并提高了稳健性。
SLAM 也被用于机场的自动驾驶演示
在自动驾驶方面,2019 年全日空、Advanced Mobility 和 SB Drive(目前为 BOLDLY)进行的机场禁区自动驾驶相关示范实验中也使用了 SLAM。 演示中首次采用除GNSS和惯性导航之外的SLAM技术进行自定位,确认了机场匝道巴士的运行状况。
因此,三种方法中,由于SLAM的准确性,人工干预较多,需要进一步提高准确性,加强复用。
看起来问题还是有的,但是对于开发者来说,会是一个商机。未来对具有高精度和高处理能力的SLAM技术的需求可能会进一步增加。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号