微型机器人旨在将微型电子元件组装成小型设备,例如手机。
法国工程师提出了他们声称是世界上最快的工业机器人,同时也是有史以来最小的工业机器人之一。与工厂中看到的传统机械臂不同,MiGriBot是大型重型设备,它的诞生是为微型化至关重要的行业,如微电子行业量身定做的。MiGriBot--其名称代表 “小型化机器人抓手”,可以每分钟抓取和移动一个微型物体近720次,或每秒钟12次操作。
更重要的是,它的操作精度为微米,或百万分之一米,这对于每次将微型设备的电子元件放在正确的位置是至关重要的--例如,一部移动电话的印刷电路板有500多个元件,都很微小。
法兰西大学的Redwan Dahmouche解释:“目前用于机器人力学的技术很昂贵,在时间和精度方面有很大的进步空间。哈佛大学在2018年推出了MiniDelta,但它无法抓取一个物体。2020年,东京大学实现了这一壮举,但其机器人每分钟只能进行72次操作。因此,挑战是在这些标准上下功夫,要有一个紧凑、快速和准确的机器人。”
为了实现他们的意图,法国研究人员首先必须找到最合适的组件。该机器人异常灵活的机械臂是由聚二甲基硅氧烷制成的,这种化合物也存在于油和一些橡胶中。根据材料的密度,这种聚合物可以采取不同的形式,从有机微流体到胶状质地。这种弹性有助于使结构更轻,加快了处理物体的速度。
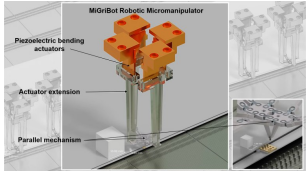
然而,速度和准确性不仅仅是材料的问题,所以也有必要设计一个更好的结构--"并行 "架构。
平行结构
大中型机器人(从几十厘米到几米),以及工业中使用的微型机器人,一般都是按照串行结构建造的:构成机械臂的所有元素都是串联组装的。每个元件(包括执行器或微电机)都是一个接一个地放置,这大大限制了设备的行动速度。
在这种情况下,机器人的建造采用了所谓的并行架构,Dahmouche解释说:“一般来说,机器人结合了多个系统。例如,抓手总是独立添加,代表了整个链条中的一个独立环节。但在这里,所有的元素都是同一个系统的组成部分。”
因此,MiGriBot的执行器都与机器人的底座相连,这使得关节的反应速度更快,使不同部分之间能够更好地协调。这位研究人员补充说:“这个机器人的原创之处在于它的结构,我们完全重新设计了这个结构,目的是在这个规模上应用这个规格。”
另一个优势是,集成化和小型化的结构使机器人可以使用传统的微电子装配线进行生产,从而为生产几十甚至几千个MiGriBots在装配线上使用提供了可能。
Dahmouche补充说:“最终,我们希望能生产出能够组装微电子学中最复杂结构的微工厂。这不仅仅是一个盈利的问题:在一平方米内有成千上万的微型机器人,每分钟进行数百万次操作的可能性,将大大减少制造过程中的能源消耗。”












 粤公网安备 44010602004358号
粤公网安备 44010602004358号