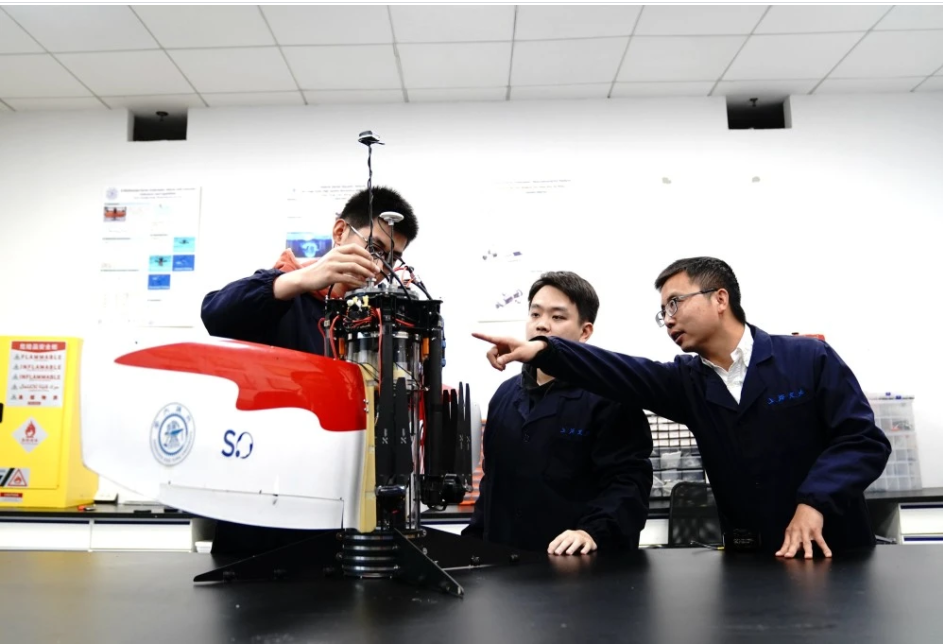
上海交通大学海洋学院海洋技术团队成员在工作中(4月1日摄)。新华社记者 张建松 摄
一种新概念的海空两栖无人航行器“哪吒”由上海交通大学海洋学院海洋技术团队成功研制,多项技术获得国家发明专利,相关研究成果近日发表在国际权威期刊《海洋工程》。
据上海交通大学海洋学院海洋技术团队曾铮副研究员介绍,“哪吒”是将水下滑翔机的设计理念与无人机的设计思想进行了有机融合,具备垂直起降与悬停、水平飞行、水下滑翔等多种功能于一体。不仅能在空中飞行自主定位,还可以在指定海域或者水面降落,并进入水下潜航,完成水下的观测任务后钻出水面,自主飞行返航。巧妙之处是,“哪吒”的固定翼不仅是空中的飞行翼,入水以后还可以成为滑翔翼。旋翼则可实现航行器在水、空跨界过程中的稳定起降。
作为海空两栖的航行器,“哪吒”高强的本领来自科研人员长达五年坚持不懈的技术攻关。上海交大海洋技术团队连琏教授、曾铮副研究员带领卢迪、熊程珂、吕晨昕、胡锐等成员,在上海市社会发展科技攻关项目、上海交通大学重点前瞻布局基金项目、青岛国家海洋科学与技术国家实验室开放基金项目等支持下,成功研发了承压耐蚀高速电机、小型轻量化浮力调节系统、海空跨介质航行的非线性稳定控制器等一系列关键核心技术。
其中,承压耐蚀高速电机采用了和传统水下推进器动密封完全不同的技术,既能够在空中高速转动,同时也能在水下承压。获得国家发明专利的高压气动浮力调节系统,采用高压气体源作为浮力调节驱动力,实现航行器浮力和俯仰姿态的同步调节,通过这套独特的小型轻量化浮力调节系统,可满足两栖航行器对载重的严苛要求。此外,针对航行器在入水过程中受到风浪流的干扰,团队成员设计了多种控制算法,做了大量仿真实验,为攻克这一难题提供了解决方案。
目前,“哪吒”已具备50米级水下航行、5千克负载能力以及良好的空中运动与跨介质能力。2020年,“哪吒”在浙江千岛湖成功进行了测试,今年还将赴南海进行海试。
上海交通大学海洋技术团队实力雄厚,近年来承担了多个国家重大项目,在无人遥控潜水器作业系统、深海智能浮标、海空两栖航行器、深海探测与作业技术等方面取得了多个重要进展和成果。
业内专家认为,作为一种穿越航行于空中、水面和水下的高机动性跨介质运载平台,“哪吒”未来有望广泛应用于海上搜救、海洋科学、海洋工程中等领域,对特定海区同时进行空中、水面和水下的探测任务,大幅提升我国海洋立体监测水平和能力。
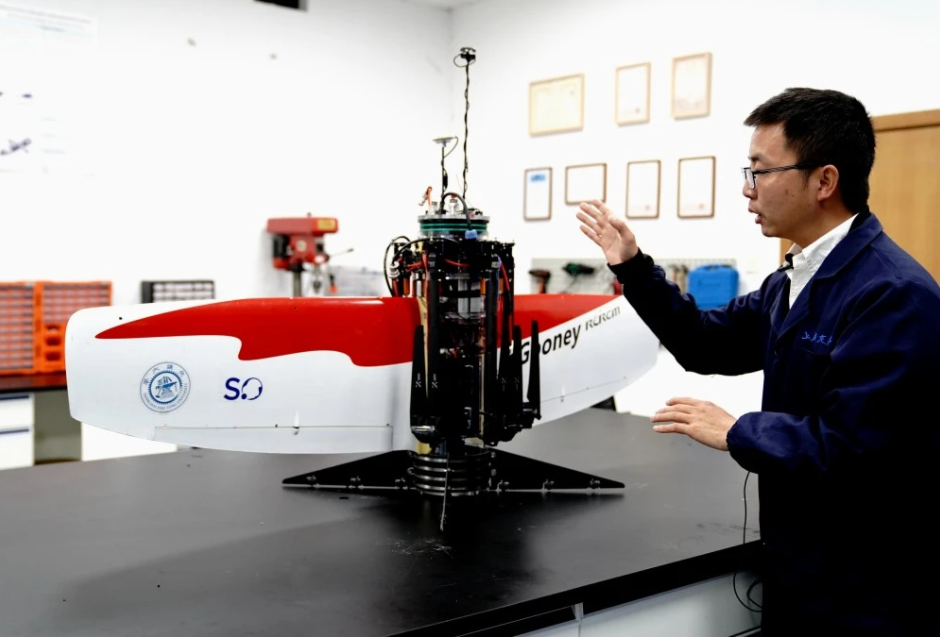
上海交通大学海洋学院海洋技术团队曾铮副研究员介绍“哪吒”(4月1日摄)。新华社记者 张建松 摄
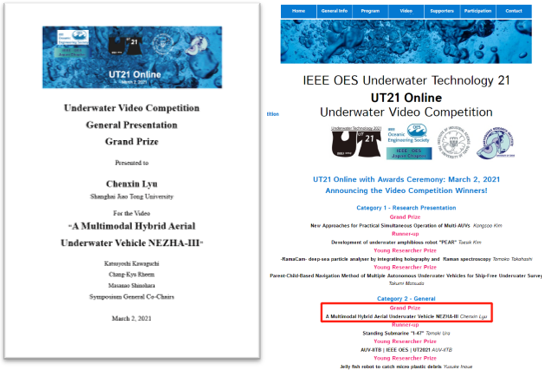
上海交大海洋学院“一种多模式海空两栖航行器-NEZHA III”
获得IEEE OES UT21水下视频大赛特等奖
近日,“IEEE OES Underwater Technology 21 (UT21 Online) Underwater Video Competition 水下视频大赛”在线上举行。上海交通大学海洋学院的参赛作品“一种多模式海空两栖航行器-NEZHA III”获得本次大赛常规组特等奖,是本届大赛中唯一获奖的中国参赛作品。
本次视频比赛分为研究组和常规组,比赛旨在通过展示水下技术相关影像,为行业研究人员提供启发以促进海洋技术和海洋监测领域的研究。

交大海洋学院博士生卢迪设计制作的NEZHA III型海空两栖航行器的外场试验记录视频“一种多模式海空两栖航行器NEZHA III”,以其新颖的概念和水空跨介质过程中所展现出的优异性能,获得评委们的一致认可。
参赛视频记录了NEZHA III 型海空两栖航行器2019年在千岛湖水域进行湖试测试时的过程,展示了海空两栖航行器的完整运动过程及其工作原理。该研究得到上海市社会发展科技攻关项目,上海交通大学重点前瞻布局基金项目和青岛国家海洋科学与技术国家实验室开放基金资助。相关研究成果于近日发表在Ocean Engineering,题为《Design, fabrication, and characterization of a multimodal hybrid aerial underwater vehicle》,作者卢迪是由海洋学院连琏教授和曾铮副研究员共同指导的博士生。视频由团队硕士研究生吕晨昕拍摄、剪辑和制作。
海洋技术团队研制的NEZHA III 型海空两栖航行器首次将水下滑翔机的设计理念与无人机的设计思想进行了有机融合,创新性地提出一种具备垂直起降与悬停、水平飞行与水下滑翔功能的多模式海空两栖无人航行器,已获得多项国家发明专利。该航行器具备50米级水下航行、5kg负载能力以及良好的空中运动与跨介质能力,是当前国内外公开发布的两栖航行器成果中下潜深度最大、负载能力最强、水下运动范围最广的一款海空两栖航行器。NEZHA III 型海空两栖航行器将拓展当前自主水下观测系统和无人机在海洋观测采样应用中各自的局限,未来有望应用于海洋科学、工程与军事中要对特定海区同时进行空中、水面和水下的探测任务,将显著提升我国海洋立体监测水平和能力。
IEEE OES International Symposium on Underwater Technology是由国际电子与电气工程师学会(IEEE)海洋工程分会(OES)出资主办的一项集赛事、学术会议为一体的综合活动,每两年一次,获得国内外众多高校、企业和媒体的关注。此次会议/比赛是由IEEE Oceanic Engineering Society Japan Chapter和Institute of Industrial Science, the University of Tokyo以及Earthquake Research Institute, the University of Tokyo联合承办。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号