随着智能物流的飞速发展,不难发现工厂物流的两个趋势:仓库的空间越来越紧凑;需搬运的物品重量越来越大。而采用差速驱动、单舵轮驱动的传统 AGV / AMR ,因无法全向移动而需更大的转向空间,导致其无法在紧凑空间中灵活搬运货物,此外,差速驱动和单舵轮 AGV / AMR 的单个驱动电机的功率有限,导致无法低成本地提高单个电机的功率来搬运过重的物品。
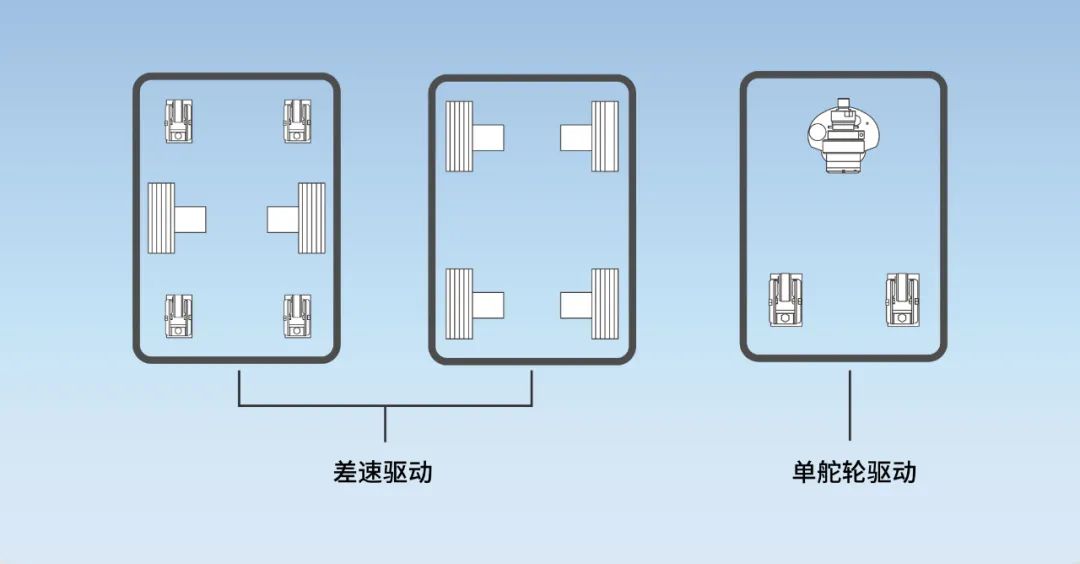
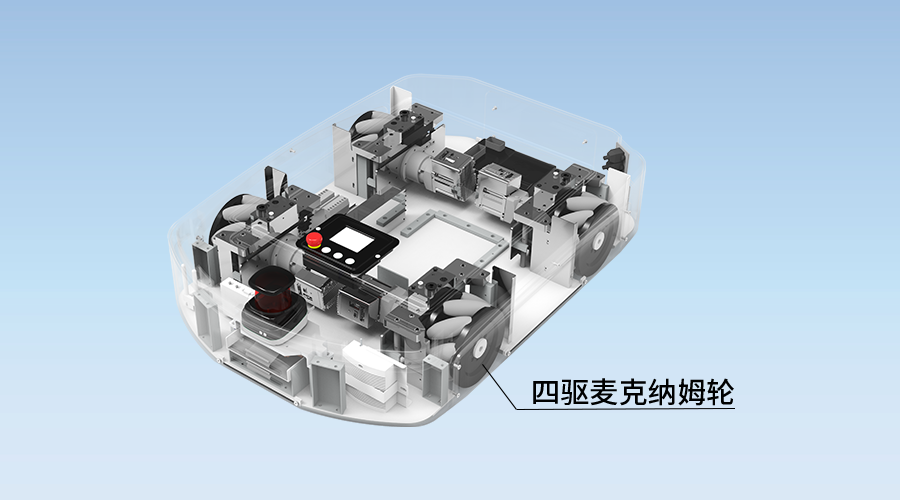
差速驱动、单舵轮驱动运动模型示意图于是具有全向移动功能的 AGV / AMR 面市,直至今日,一提到全向移动,大家自然而然地联想到的便是四轮驱动的麦克纳姆轮和双舵轮 AGV / AMR 。美中不足的是,四轮驱动的麦克拉姆轮 AGV / AMR 虽能全向移动且负载力高,但由于其不仅对搬运地面的要求苛刻,而且麦轮拉姆轮价格昂贵,导致其实施及维护成本高昂,遂无法被广泛应用。
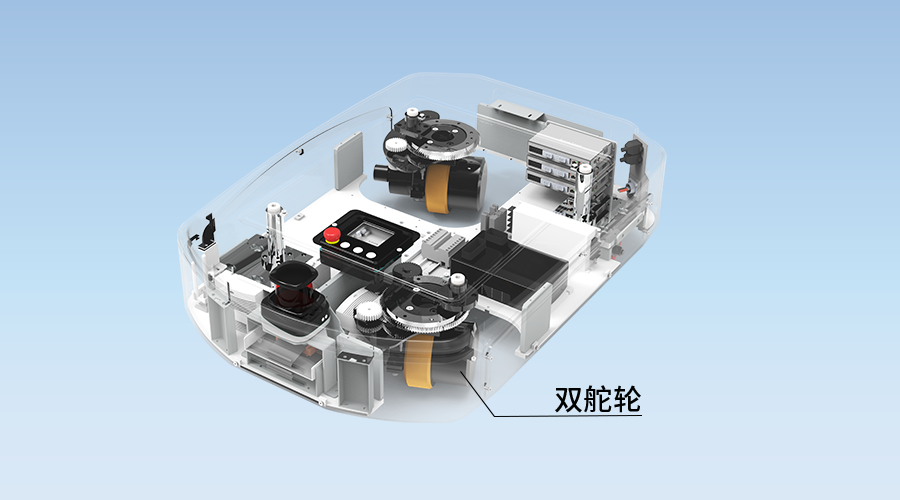
麦克纳姆轮运动模型示意图而双舵轮 AGV / AMR 虽拥有两个舵轮模组,且具有驱动能力大、全向移动的特点,但由于舵轮模组成本高且高度无法缩减,使其应用也受到限制。
双舵轮运动模型示意图今天,我们要介绍的双差速模组 AGV / AMR ,不仅具有成本低、全向移动、驱动能力大的特点,而且能在紧凑空间内实现全向移动及高负载搬运。这也是仙工智能(SEER)技术的新动态,即在 SRC 核心控制器中增加双差速模组的运动模型来实现双差速模组 AGV / AMR 的制造。

双差速模组运动模型示意图
双差速模组运动模型中的双差速模组是一个转向和驱动模块,替换了传统机械复杂的舵轮模组(传统机械舵轮模组在底盘上能够转动,但转动范围会受到机械结构或电缆的限制)。













 粤公网安备 44010602004358号
粤公网安备 44010602004358号