本次内容会讲解【宏程序】以及【移动指令Plus】这两个小技巧来提高各位的编程效率以及提升程序的易用及稳定性。
宏程序
各位小伙伴在使用MiR编程的时候是否有过这样的经历:当需要统一修改某项参数时,只能机械地一个个进入到任务中去查找到每行对应指令去修改。这样做法不仅效率不高往往还会容易造成遗漏。那有没有什么好方法呢?这里我们介绍的【宏程序】就能大大提高您的编程效率及准确性。
这里我们以最常见的【Move命令】作为例子。
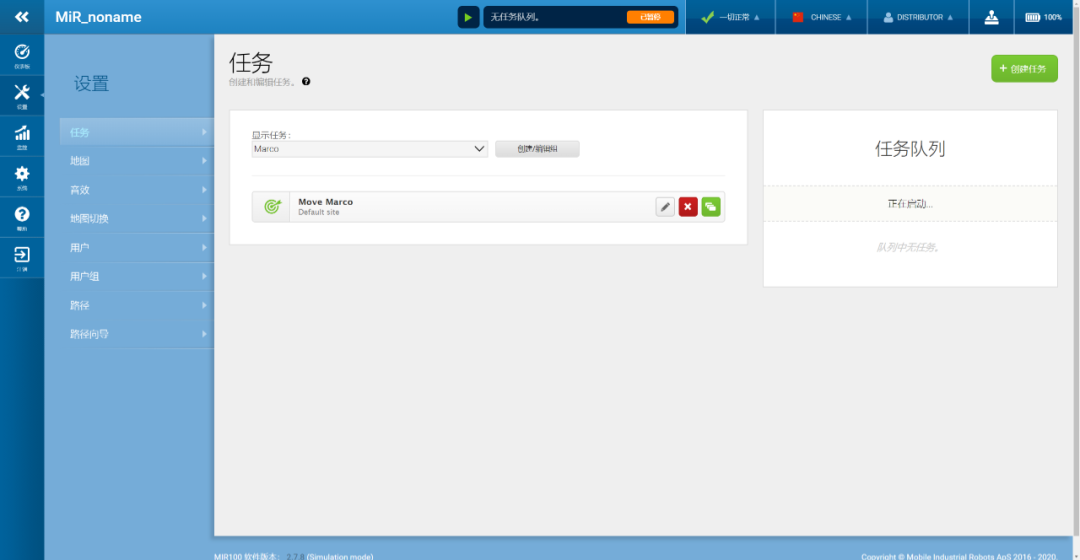
首先,进入到设置 > 任务中创建一个名为【Move Marco】的宏程序。
*您可以在创建任务的过程中同时创建一个宏程序的任务组方便之后创建的宏程序的归档。
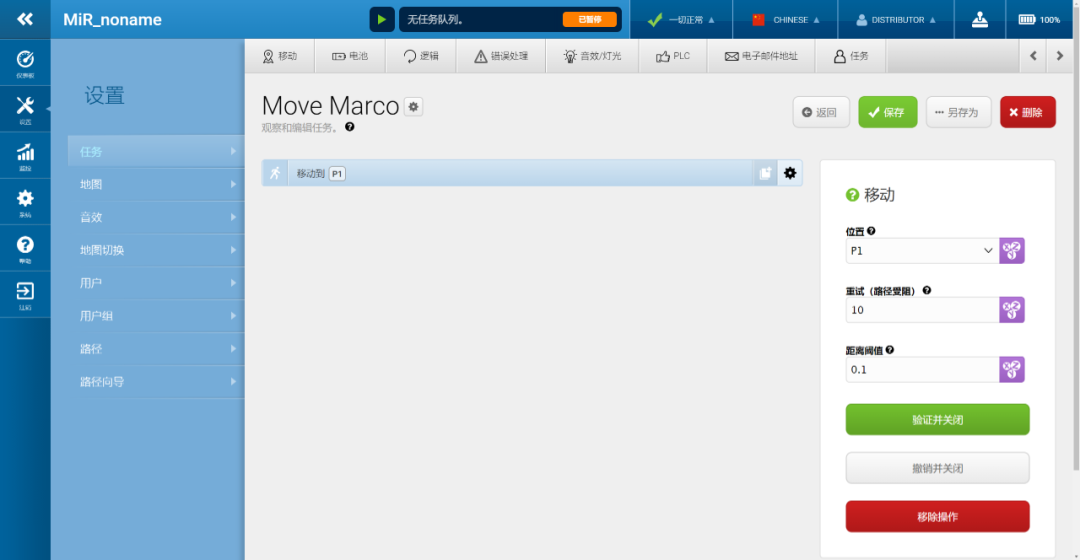
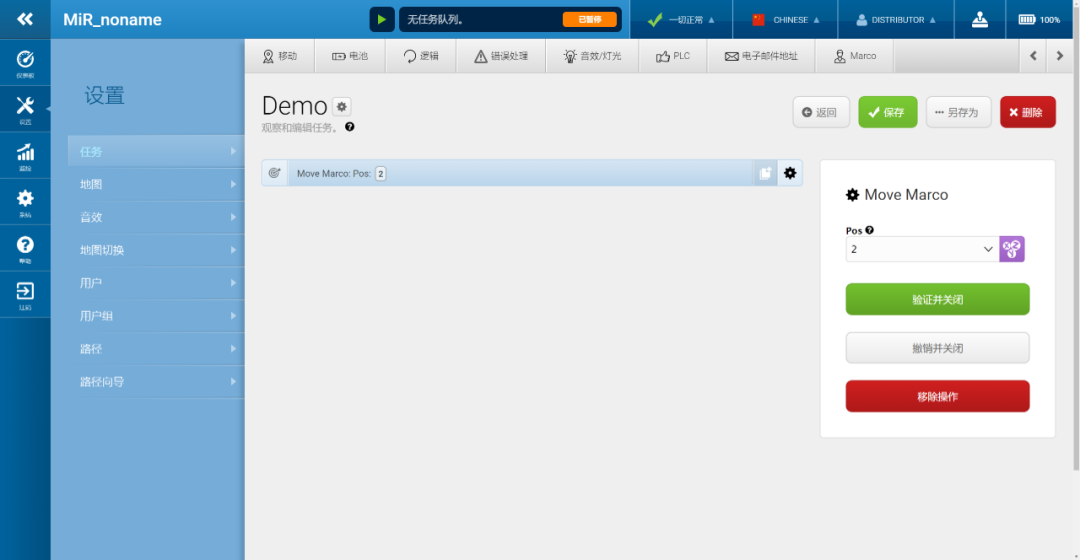
创建一个移动命令并点击⚙,进入参数编辑窗口。
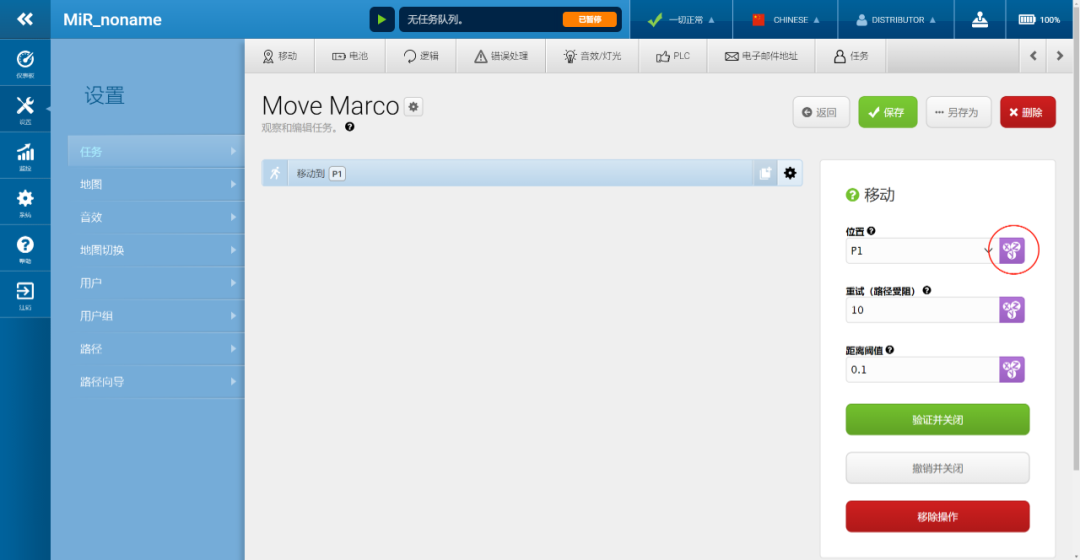
点击下图中图标创建一个名为【Pos】的变量。
在弹框中点击【创建变量】创建一个移动变量。
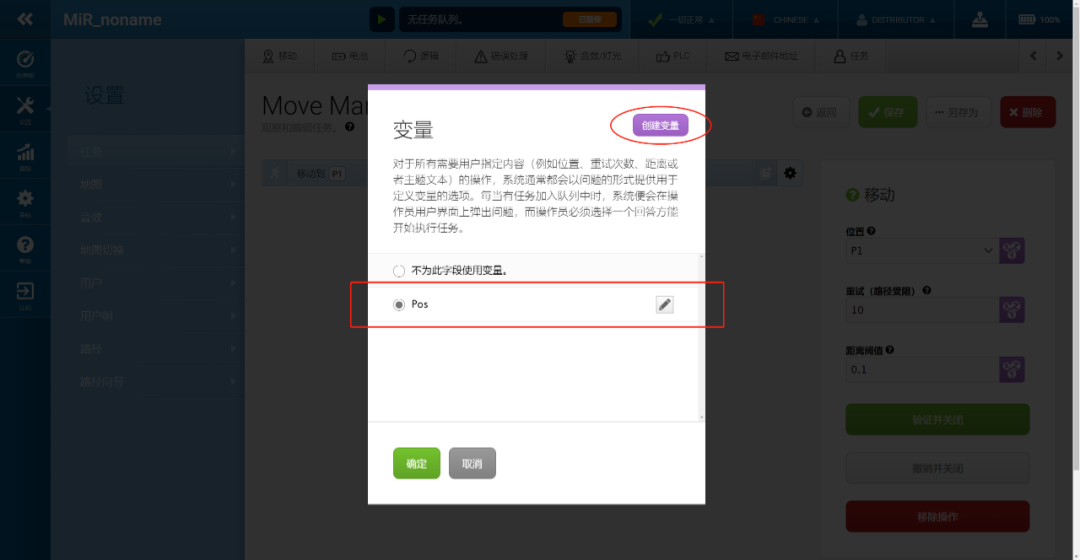
保存退出,之后编辑运行程序时直接调用该宏程序并点击⚙。在弹框中选择需要移动到的点位即可。后续修改尝试次数或者停靠精度只需修改宏程序即可。
*所有带有












 粤公网安备 44010602004358号
粤公网安备 44010602004358号