
设计团队:上海海事大学

技术亮点
● 通过摄像机读入图像,然后进行泊位标志物检测,之后进行视觉导航,获得航向偏差角和偏航距离,最后利用PID进行路径控制。
● 标志物检测环节,包括RGB空间转HSV空间,设置期望颜色阈值,二值化处理并进行中值滤波,形态学处理消除干扰,获得标志物几何中心和边界并在图像中显示。
● 视觉导航策略中,自主靠泊类型为泊位外镇定且选择距离泊位标志物1.5m-2.5m处为靠泊区域,区域中心为期望位置,垂直于标志物表面的航向为期望航向。控制器的控制变量有航向偏差角和偏航距离,故先计算这两部分。
实船试验与测试
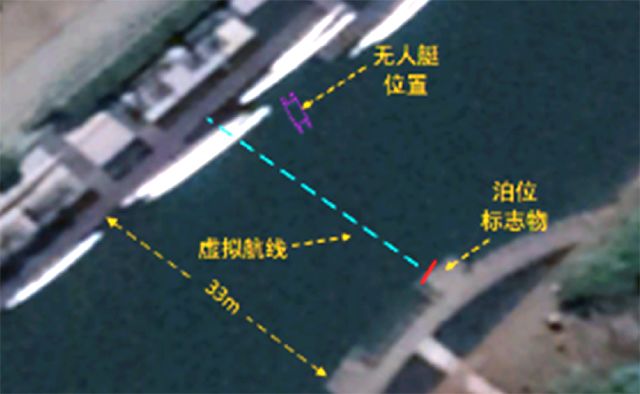
试验场场景图
设计灵感
大型船舶靠泊依靠拖轮,小型船舶在条件允许时可进行自力操纵靠泊,但70%的靠泊事故与驾驶员在港内不良船艺有关,急需通过精确的自主靠泊规避风险。通常无人船不配置横向推动器,属欠驱动控制,在低速运动状态下无人船的操纵性能和舵效相对较差,而靠泊精度要求又高,很难实现对艇的镇定控制。仅仅利用卫星导航,造成其对周围环境感知能力不足。基于此,有此设计理念。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号