一
报告导读
本文报告介绍了水下仿生机器人的设计,从作业臂系统、运动控制、环境自主感知与导航和三个方面介绍了目前的研究现状,同时带来了研究团队在这些关键问题上的最新研究成果,最后介绍整个水下抓取自主作业控制流程。
二
专家介绍

王硕,中国科学院自动化研究所复杂系统管理与控制国家重点实验室研究员、博导,智能机器人系统研究部负责人,国际标准化组织ISO/TC 299专家,中国人工智能学会智能机器人专业委员会和智能产品与产业工委会委员。曾获国家自然科学二等奖、北京市科学技术奖一等奖等奖项。主持过国家863计划项目、国家自然科学基金(联合基金)重点项目等。在国内外刊物与会议上发表学术论文120篇,其中SCI论文24篇。主要从事仿生机器人、机器人控制与规划、模仿学习、多机器人系统等领域研究。。
三
报告内容
从海洋来说,十八大报告中重点介绍了海洋强国战略,海洋战略已经是国家非常重要的位置,具有重要意义。“十三五”可以看到,国家正在大力发展深海探测、海洋资源的开发和利用、海上作业保障,特别在前海,有很多海洋牧场。随着大量食物的需求,对海洋牧场的要求也很高。对水下机器人,可以做很多的水下移动作业机人。最早的这种机器人在水下应用就是石油钻井平台,早期做墨西哥湾的石油漏油,就是利用水下机器人完成水下作业,进行管道的封闭。另一方面,在斯坦福大学做OCEAN ONE的双臂水下机器人,可以在水下进行双臂协作操作,对目标进行抓取,在红海附近完成了水下目标的文物采集的工作。还有一些像深水的TRIDENT,在欧盟项目做水下机器人,主要做搜索和打捞,大家知道马航坠落之后,寻找黑匣子,如何打捞,水下机器人起到了重要的应用作用。像我们中科院自动化所也做了一些水下自主抓取的动作。
但水下机器人自主作业面临着巨大挑战,这些挑战当中,首先是弱光线。我们在这个大的场景里面看,光线是很好的,但是水下环境是黑暗的,黑暗环境下机器人怎么能够很好地识别目标、看到目标,也是很重要的问题。另外一个是弱通讯的问题,我们用手机联系是很方便的,用5G或者不同的无线通讯手段,非常方便。但是在水下就有很大的困难,唯一有效的方式是水声通讯,这里面涉及到不同的深度、不同通讯距离,通讯效果还是非常差的,很难做高速传输。我们用手机的话,像5G,一下子可以下载好几个视频。但是在水下,用水声通讯,只有100多K,就像很早的时候用modem,跟水声通讯是类似的。另外水下环境是未知的,也非常恶劣,水下的气流、水流的影响,经常有不同的变化,没有办法进行很好地预测和建模。
此外,我们在水下机器人进行运动时有很多不确定的扰动影响,水下洋流的变化、潮汐的变化,都有很大影响。另外有内外部的耦合,机器运动时产生的扰动在有些特殊环境下,对它本身也会造成响应的扰动影响。还有一些多目标、多约束的复杂作业的环境,我们让机器人完成有效的作业,完成不同的多个作业目标,要满足速度,不可能游的太快,不可能转弯太快,在有些避让的情况下要很好地路径规划。
针对水下进行挑战性问题的时候,给出了一个竞赛的模式,通过水下目标抓取大赛研究水下机器人,提升水下机器人的智能性。
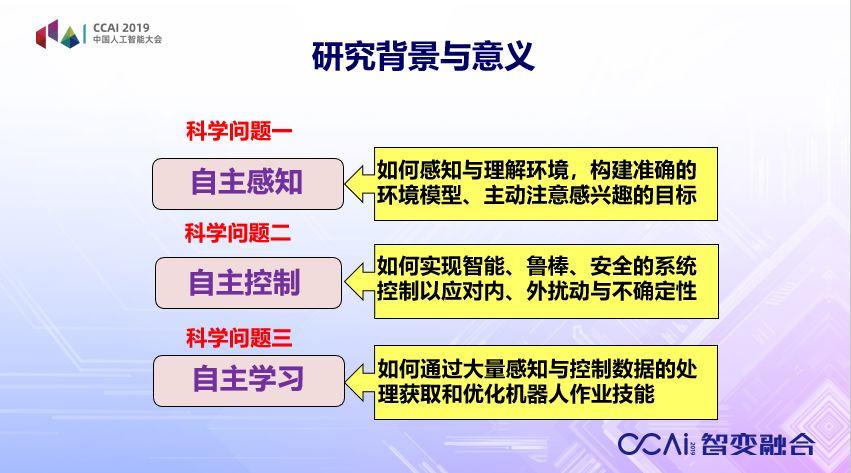
这里我们经常用的水下机器人,希望用水下机器人代替人类的潜水员。像水下的捕捞,大量是需要潜水员进行水下作业,传统的模式是用拖网的方式进行打捞。但是拖网打捞对海洋生物影响比较大,很多海产品被一网打尽,必须对海底富营养层重新保护,才能重新放养海参的苗。所以用机器人替代潜水员完成海参、海胆、扇贝等捕捞工作。这里面完全包含了水下机器人面临的主要的挑战性问题,这里面最关键的我们不是希望它是手工的遥操作,我们希望它自己发现目标,自己采取相应的抓取策略。根据这样的工作,我们做了一些基本的研究,首先是作为一个水下机器人系统,我们大部分人都谈到智能的算法。但是作为机器人来说,算法和它的载体是必须要相互配合的。就像可以看到我们人用双足走路,但是我们不可能像马一样,手足并用,不可能像马跑得一因快,所以不同条件下有一定的适应性。从结构上,要怎么样考虑适应环境的特点。另外是如何进行环境的自主感知和导航。再有的是,进行特定操作运动时,为了满足特定的操作精度要求,需要做悬停和路径规划。同时在水下客观进行交互学习,让机器人逐渐抓取海产品。所以我们简单开始了以下几个方面的工作,首先进行机器人设计,有了机器人载体,怎么样能够灵活地在水下控制。另外希望机器人对环境感知判断自身的状态,有了这些自主状态之后,机器人可以结合自己的结构约束判断如何自主作业,通过智能的方式很好地实现复杂的作业任务。这里面开发了大概三代不同的机器人,这是第一代的、第二代的、第三代的,几代不同的机器人系统。在设计上来说,采用仿生结构的特点,传统的螺旋桨,在水下容易被海草纠缠,一旦缠绕之后,就失去动力了。但是仿生鱼类,很少看到鱼类被海草缠住,所以有它的运动特点,就采取仿摇鱼的波动形式,避免被杂物缠绕。另外在臂的设计上,设计轻量化,如果臂比较粗重,臂的运动必然引起身体的协调运动,大家游泳的时候经常发现,自己手在运动的时候,手向前推的时候,身体会往后走,这就是体和臂的耦合。所以我们做了一个轻量化臂的设计。这里做了一个长鳍结构,为了把臂量减轻,把重的部分移到基座部分,基座部分有大量的电机,通过带传动降低臂的重量,在水下运动时阻力就会非常小。这是整个完整系统的集成,可以把臂这些东西以模块化的结构,很好地集成在一起。然后是双目的视觉系统,给机器人做检测和定位应用。

下面具体介绍水下机械运动控制,模仿生物的波动运动,通过建模构建成正弦函数和余弦函数波动的运动模型,通过控制模型里面波动的运动方向、运动频率和波数,实现整个系统的协调运动,最终产生像鱼的长鳍一样波动的推进效果。
通过两侧长鳍的波动推进,在水下很好地实现平稳前进或后退的动作。因为这个长鳍两边是对称的,可以正向运动、反向运动,中间还可以侧向移动运动,所以机动性比传统的推进器要好一些。但是有个比较重要的问题,我们在做螺旋桨推进时,通过螺旋桨的转速估计推力。但是这种仿生的设计,如何计算推力是比较困难的问题,我们用有限元分析的方法计算整个系统的推力过程,但是实际应用中,有限元计算量比较大,而且计算的结果跟实际结果存在一定差异。所以现在就采用模糊的逻辑方法,通过输入不同的参数,建立不同的规则,估计它的推力。同时可以反向的,在输入推力使转换陈机器人波形的运动参数,从而实现它的控制。
这里面基于ADRC的控制器给出一个相应的控制结果,最核心的是推出基于模糊推理的参数影射,可以把控制输出的力的信息转换成波动形的运动学的控制信息,这是一个完成的一个具体工作,通过控制方法很好地进行航向控制。当有了航向控制和深度控制之后,可以很好地实现机器人三维空间的运动控制。这是很好的航向控制,这是通过连续的航向切换实现机器人的运动控制。
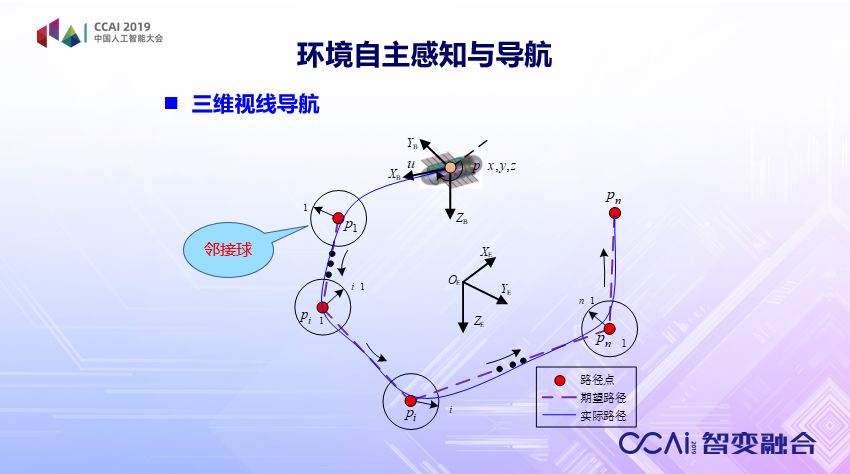
这个是出现定深的控制,保证机器人在一定深度进行工作,避免深度变化的影响。自己保证深度之后,可以跟水下底面保持一定的距离,保持自己的作业空间。下面介绍一些环境感知和导航的具体工作。当有了基本运动控制之后,希望机器人如何从它的初始点到达目标点,到达过程机器人要满足自身的约束条件,比如转弯不能太大,不同的速度下转弯半径是不一样的,而且浮浅时有下滑的角度,有的机器人是垂直下去,有的是必须有下滑角度才能实现运动控制。所以给出一个RDDH的运动控制的算法,简单来说就是把一个物理约束的东西,比如爬长城很累,那可以走Z字形,那机器人也可以用类似的方式实现类似的功能。这里面有了前面的基本运动控制工作,可以给出它的游速控制、航向控制,通过三维的视线导航,从前面的方法给出不同时刻机器人要到达的位置、速度和航向,可以对机器人实现三维空间的运动控制。这里给出一个三维的视线导航方法,三个连接球的方法,根据不同的切割点,机器人到达不同的路径之后实现对整个轨迹的跟踪。这里可以看到一个简单的三维路径点跟踪的实验,通过波动方式,在三维空间实现定点定向的不同路径点的跟踪过程。可以看到,本身的运动过程是三维空间进行运动的,并不是在一个平面运动。通过三维的跟踪方法,可以实现机器人从目标点到给定的工作区。
另一方面我也研究了一个特殊情况,三维螺旋线的,相对特殊的曲线,用途比较多,我们也针对控制方法给出了相应结果。这是针对三维螺旋线给出的跟踪过程,这是最新的,两侧长鳍带臂的水下机器人,完成一个螺旋线的跟踪控制。
这个最终是实现视觉的自主悬停,面对一个操作目标,要把目标位置信息反馈到机器人,对目标准确跟踪,让目标反馈到视觉中心,方便机器人在水下进行必要的操作。可以看到这个机器人始终在双目视觉范围内,波动时会自动调整。有的在基本的控制之后,可以考虑到水下目标抓取的任务。但是在实际场景中不是特定形状的物体,是水下生物的物体,所以对生物物体进行必要的识别。在水下,一般面临的问题,水下是绿色场景或者蓝色背景情况下,对水下目标进行相应的增强,通过学习的方法,把目标进行标记,哪一个是海胆,哪一个是扇贝,哪一个是海参,根据不同的标记对目标进行测量,如果太小了就不要了,如果很大的值得捕捞的,就进行捕捞。
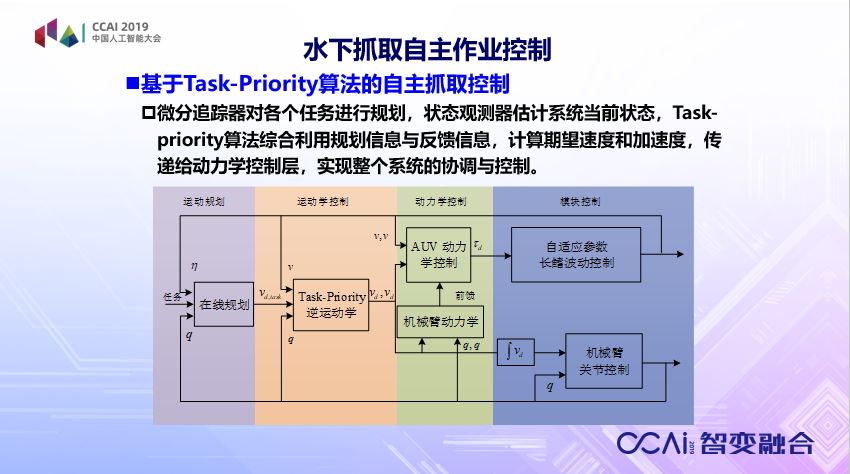
在给出视觉识别和运动控制之后,要考虑如何进行水下作业。我们用了一个多点杆的臂,这里可以看到一个比的简单运动控制效果。这是轻量臂做的一个抓取实验,阻力非常小,可以快速实现目标抓取作业。同时,我们从前面的运动规划到目标的抓取、跟踪识别,都统一在完整的系统里面,最后做一个完整的实验,基于任务优先级的,当离目标比较远的时候要想办法趋近目标,当离目标比较近的时候要判断是该抓取还是悬停,使机器人很好地完成最终的目的。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号