
熟悉ROBOSEA的都知道,我们是一家以仿生为特色的水下机器人公司。无论是B端的仿生鲨鱼,还是C端的仿生盒子鱼(BIKI),均是以鱼类为原型而设计的仿生机器鱼。
那么,我们为什么要研发设计仿生机器鱼呢?
鱼类,作为自然界最早出现的脊椎动物,经过亿万年的自然选择,进化出了非凡的水中运动能力,鱼类的游泳技巧远高于人类现有的航海科技。
和普通的水下推进器相比,鱼类的游动具有推进效率高、机动性能好、隐蔽性能好等优点。
推进效率高
鱼类的高效率与其完善的流体性能有关。鱼类通过尾鳍的摆动能消除螺旋桨产生的与推进方向垂直的涡流,产生与推进方向一致的涡流,并且整理尾流,使其具有更加理想的流体力学性能,从而提高效率。
初步试验表明机器鱼的推进效率比常规水下设备高30%以上。采用机器鱼作为水下机械可大大节省能量,提高能源利用效率,从而提高了水下作业时间和作业范围。
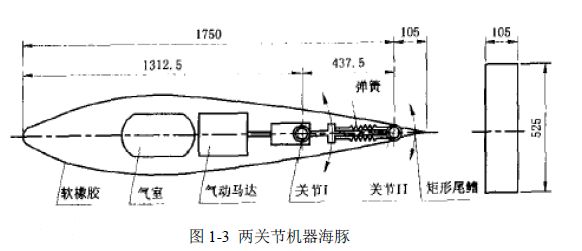
上图是1999 年,日本的M. Nakashima,K.Tokuo 等人研制了一条自主驱动的具有两个关节的自推进的机器海豚,该机器海豚是高速游动海洋生物海豚的简化模型,长1.75米,与实际海豚的尺寸非常接近。
该机器海豚由流线形身体和矩形尾鳍构成,第一个关节由空气马达驱动,第二个关节由弹簧驱动。研制了测量第一个关节转矩和转角的测量系统,该机器海豚的推进速度可达1.2m/s,推进效率约为35%。
机动性能好
机器鱼具有高速启动、加速的性能,以及可在小范围内实现不减速转向运动。研究发现,生活在水中的依靠敏捷运动才能生存的鱼类,可以不减速实现转向运动,并且其转向半径只有其身体长度的10%~30%。而现在的机动船在转向时其速度要降低50%以上,并且其转向半径大。
由于采用身体波动式推进的机器鱼体型细长,并且具有足够的柔韧性,使其在空间狭窄、空间结构复杂的场所有着更良好的机动性能。因此它可以在波涛汹涌、地势险峻的海洋环境中进行水下探测和水下作业。
噪音低、隐蔽性能高
在军事应用方面,由于机器鱼在雷达上的表现形式与生物鱼类几乎相同,能够轻而易举地躲过声纳的探测和鱼雷的袭击,出其不意的攻击对方舰艇、基地,具有重大的军事应用前景。而且在民用上,可以用于海洋生物观察。
仿生机器鱼案例
这是Festo研发的仿生机器鱼BionicFinWave,仿的是一种运用纵鳍游动的海扁虫。
这只仿生机器鱼和靠摆动尾鳍游动的普通机器鱼不同,它靠身体两侧的硅胶肉鳍产生波浪,借此推动身躯。通过这种鳍片起伏运动,仿生鱼BionicFinWave可以控制自身运动。
仿生机器鱼机体上有两个伺服电机,两个相邻的曲轴将动力传递至杠杆,使两个鳍片能够单独移动。以这种方式,它们可以产生不同的波形,特别适合于慢速和精确运动,并且相比传统的螺旋传动器所搅拌的水量更少,更加节能。

上图是Robert Katzschmann和来自麻省理工学院的软机器人研究小组创建了一种电池供电的机器鱼—SOFi,能够一次在水下待40多分钟,科学家们目前多用它来研究珊瑚和水下的生态环境。
关于SOFI的操作,工作人员最远可以在15米左右的地方用一个足够小的远程控制器来操纵它的运动,它的电池充电大概需要一个小时左右。
对于SOFI未来的展望,Robert Katzschmann表示:“由于SoFi很容易的控制方式,这可能为科学家和休闲潜水员打开大门。SoFi的商业化版本可以让科学家、潜水员以新的方式与海洋生物进行互动,从远程研究海洋生物,并观察鱼类捕捉,水下环境监测等的行为。”
其他仿生机器鱼案例
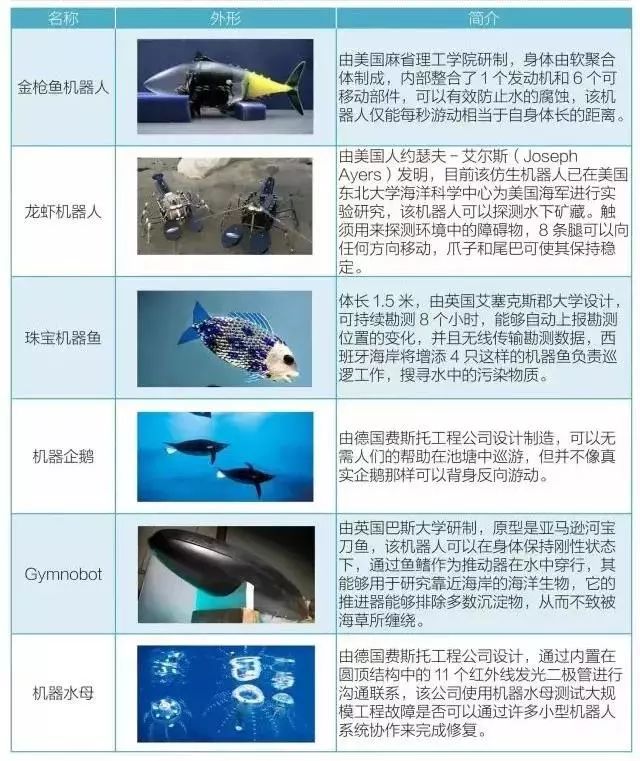
仿生机器鱼作为鱼类推进机理和机器人技术的结合点,为研制新型的水下航行器提供了一种新思路。仿生机器鱼将在复杂危险水下环境作业、军事侦察、水下救捞、海洋生物观察、考古等方面发挥重要作用。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号