今天浅谈一下潜伏式AGV小车的两种驱动形式。
AGV搬运机器人通常会用到两种驱动形式《差速驱动》和《舵轮驱动》
那么下面就为大家简单介绍一下两种驱动形式的优缺点
如下图所示:《差速驱动》和《舵轮驱动》

目前市场使用较多的为《差速驱动》形式

大家想必都了解,《差速驱动单元》的AGV小车配置一组差速驱动单元
可以实现单向循迹行驶功能,早期汽车厂的AGV小车大多是单向行驶循迹,因AGV小车只需牵引着物流台车,单向运行即可满足客户应用需求,之后为了达到更多的使用需求,从而出现了双向行驶的AGV小车,但是需要配置两组差速驱动总成才能达到双向行驶的功能。
事实上在现实的应用环境中,单向和双向已经无法满足客户的更大使用诉求了,由于受制于厂房车间空间位置限制,更多的使用单位需要AGV小车具备全方位行走功能,即:AGV小车除了前进后退左右拐弯的功能还需要AGV小车实现原地旋转,横向行走即90度横移,这样能有效解决空间上对于转弯半径的限制,达到AGV小车应用最大的使用灵活性,来满足不同客户对柔性化生产的不同需求!
而差速驱动形式是无法实现90度横移的行驶功能。
另外目前潜伏式AGV普遍是以磁条导航的方式,更高一级的导航方式如磁钉加惯性导航,激光导航,视觉导航,二维码等方式。差速总成明显不适用于后者高端导航方式,
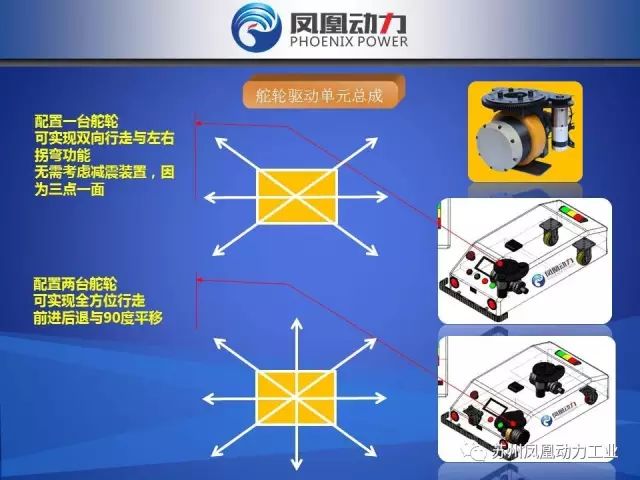
如图所示,
舵轮AGV小车,配置一台舵轮即可实现双向行驶的功能,从而节省AGV小车底部安装空间。
配置两台舵轮即可实现AGV小车的全方位行走功能,
为什么早期潜伏式AGV小车没有应用舵轮驱动的案例?
主要问题在于,早期国内外没有能提供较低安装高度的舵轮厂家,一般潜伏式AGV需要潜伏到物料台车底部,所以设计高度一般较低多数整车高度在200mm-230mm以内高度,而早期市场上的舵轮驱动总成最矮的安装高度也有250mm以上,所以无法满足车子底部的安装空间需要。
再来就是早期舵轮总成主要依靠进口,也主要是应用在大吨位AGV搬运机器人上,单价过高,货期过长,售后服务欠缺等诸多因素造成。













 粤公网安备 44010602004358号
粤公网安备 44010602004358号