
采用机器人和自动化系统对设施进行检查、维护和维修正变得越来越普遍。当用于检查净零能源发电基础设施时,该应用尤其有价值。随着世界面临气候变化危机,各行业必须实现净零排放。
管理复杂的海上基础设施面临许多挑战;主要与劳动力弹性和成本降低有关。为了应对这些挑战,格拉斯哥大学 Smart Systems Group 系正在努力创建一种共生多机器人车队(SMuRF)方法。这将包括一组不同的机器人共同努力实现一个共同的目标。通过创建一个网络物理系统,该团队旨在应对与可靠性、安全性和生产力相关的挑战,这些挑战阻碍了机器人在危险环境中的部署。
网络物理系统可以通过优化、增加交互和集中指挥来简化流程,从而为循环中的人提供基于查询的学习。这种方法在帮助实现净零排放方面具有很高的潜力,因为机器人可以通过自主检查提高能源资产的生产力。
该项目的重要性在于,它有可能帮助设施管理人员和运营商在未来通过利用各种机器人执行不同类型的检查和维护任务来扩大机器人的协调。
通常,当机器人面临无法克服的挑战时,人类必须进行干预,以纠正机器人的任务状态。这使人类无法完成其他重要任务。此外,人类干预在核设施和海上设施中执行的任务是不安全的。在这种情况下,该团队的目标不是人类干预,而是实现共生互动,一群机器人可以相互帮助,克服安全、弹性和可靠性问题方面的挑战。

Figure1:描绘未来在海上可再生能源背景下的共生多机器人舰队(SMuRF)的合成图像。
为了执行自主航路点任务,一辆带有双UR5臂的赫斯基无人值守地面车辆被用作SMuRF的一部分。哈士奇之所以被选中,是因为它能够在充满挑战的地形中生存并携带重型有效载荷。此外,机器人的文档和ROS包可随时用于编程,使其成为跟上自主检查任务优先级变化的理想选择。
“Husky提供了我们共生系统方法开发过程中所需的传感器的简单集成。它提供了一个可扩展的模块化架构,可以根据一系列任务需求轻松定制机器人平台。” – Daniel Mitchell – PhD student, University of Glasgow.
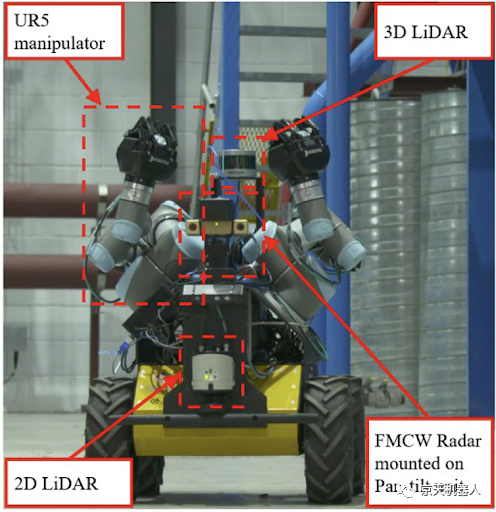
Figure 2:首次自主飞行任务中使用的双UR5哈士奇A200的图像
除了武器外,哈士奇还安装了几个传感器,这些传感器在自主任务中使用。集成并定位了3D激光雷达,以探测更广阔的环境,并提供周围环境的3D图片以及机器人上方的任何潜在威胁。2D激光雷达的定位是为了探测地面上的任何潜在威胁。该机器人还在其中一个夹具上部署了一个传感器,其中包括一个FMCW雷达,用于在任务期间进行结构健康监测。
作为SMuRF任务的一部分,哈士奇与一架DJI Tello无人机、一架Boston Dynamics Spot机器人和一个环境监测系统(LIMPET)组成了小组。哈士奇执行了多机器人自主检查任务的一部分,从位置a到位置B,完成了任务的一个部分。
创建了一个用户界面,允许操作员与机器人进行协调和通信。这包括在机器人平台上启动不同的任务,并通过几个充当设施周围安全摄像头的网络摄像头监督任务。该机器人搭载了一个传感器,用于在执行任务期间进行结构健康监测。其中包括用于检查腐蚀的FMCW雷达,以及退役风力涡轮机叶片内缺陷的表面和地下检测。在传统情况下,必须将人员部署在密闭空间内进行详细的目视检查。
使用人类进行机器人的远程操作将破坏自主系统的目的。相反,该团队创建了一个操作决策支持界面,允许单个操作员为多机器人车队指定任务。这允许对一些机器人车队进行远程操作,因为对回路中的人来说,远程操作特定的复杂任务是有益的。
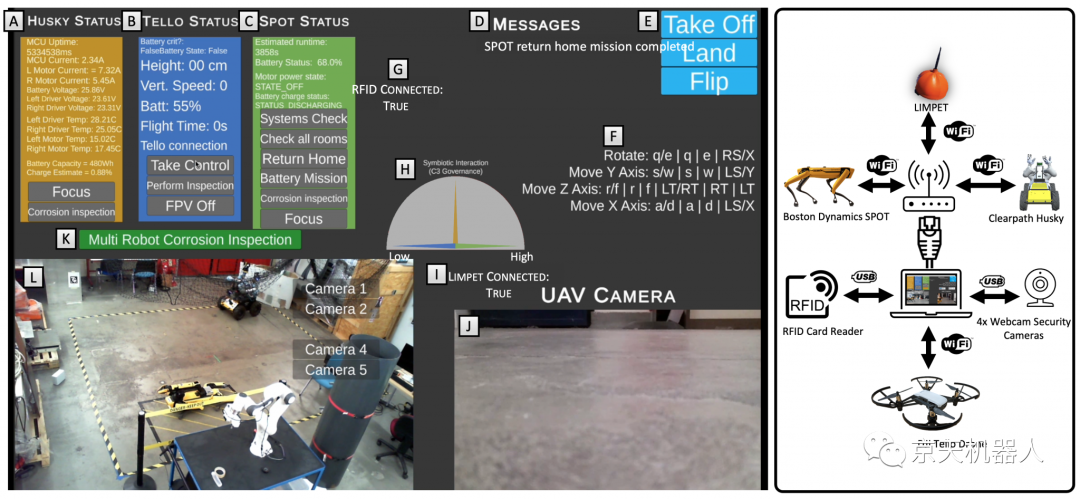
Figure 3:(左)操作决策支持界面,操作员可以在其中指挥和控制SMuRF。(右)数字共生体系结构的系统体系方法包含在设计中。
在任务的第二部分,为了展示共生相互作用,在哈士奇机器人上模拟了一个故障。因此,当任务的第二部分开始时,机器人没有按预期运行。哈士奇被编程为使用手臂完成第二次检查。机器人上的自我认证软件检测到故障,并通过描述性消息与回路中的操作员共享此信息。哈士奇和Spot之间通过操作界面进行了共生互动,以纠正Spot在任务期间能够自主从存储位置收集电池组的问题。共生互动可以在这段视频中看到,TensorFlow被用来训练Spot机器人来检测电池组和Husky机器人:
以下视频来源于
京天机器人
,时长01:24
该团队选择使用久经考验的哈士奇机器人作为其共生多机器人舰队(SMuRF)的一部分。这帮助他们节省了从头开始开发机器人平台的时间和成本。它还确保了他们的研究工作在战略上应用于项目中的关键领域。
这项研究提出了世界上第一种协调在真实世界机器人平台上实现的各种机器人平台的方法。它显示了该团队的共生方法如何在检查、维护和维修任务的受限、超视距范围内提高多机器人编队任务性能的有希望的结果。不同机器人平台之间的共生互动以应对不断变化的任务优先级,这表明这种方法可以极大地改善自主任务。
该团队的未来计划已经到位。他们最近与曼彻斯特大学、西英格兰大学和伦敦皇家霍洛威大学合作,将其共生多机器人舰队方法应用于核领域。带有辐射传感器的Jackal UGV被用于模拟核设施的机器人车队,以复制机器人如何用于操作后的清理活动。
其他计划包括通过概率建模进一步开发共生方法,在任务之前模拟更多场景,以降低风险并提高监测任务成功的效率。这些将包括用于评估任务成功概率和确定可能更有效的方法的模拟。
参与该项目的团队成员包括Daniel Mitchell(博士生)、Samuel Harper(副研究员)、Jamie Blanche博士(副研究员。Muhammad Imran(通信、系统教授/跨国工程教育学院院长),David Flynn教授(网络物理系统教授)
D. Mitchell et al., “Symbiotic System of Systems Design for Safe and Resilient Autonomous Robotics in Offshore Wind Farms,” Oct. 2021, doi: 10.1109/ACCESS.2021.3117727.
D. Mitchell et al., “A review: Challenges and opportunities for artificial intelligence and robotics in the offshore wind sector,” Energy and AI, vol. 8, p. 100146, May 2022, doi: 10.1016/J.EGYAI.2022.100146.
O. F. Zaki et al., “Self-Certification and Safety Compliance for Robotics Platforms,” 2020, p. OTC-30840-MS, doi: 10.4043/30840-ms.
T. Semwal and F. Iqbal, CYBER-PHYSICAL SYSTEMS : solutions to pandemic challenges., 1st ed. ROUTLEDGE- Taylor & Francis Group, 2022.
1 Minute Visualize your Thesis Award- University of Glasgow – Symbiotic Multi-Robot Fleets – Mr. Daniel Mitchell
ISSS Postgraduate Research Prize for 2021 at Heriot-Watt University – Symbiotic System of Systems Approach
Images of Impact Competition – Future Impact 2023 – Runner Up – Mr. Daniel Mitchelll
If you would like to learn more about the Symbiotic Multi-Robot Fleet Autonomy approach, you can visit their new website and YouTube channel.
https://www.gla.ac.uk
https://www.gla.ac.uk/schools/engineering/research/divisions/asc/researchthemes/smart-systems-group/
Husky UGV:www.jingtianrobots.com
University of Manchester:https://www.manchester.ac.uk
University of the West of England:https://www.uwe.ac.uk
Royal Holloway of London:https://www.royalholloway.ac.uk
If you would like to learn more about Husky, you can visit our website http://www.jingtianrobots.com/index.php?id=1089
If you would like to learn more about Husky Observer, our all-terrain rugged robot with a payload for inspection, you can visit our website here.http://www.jingtianrobots.com/index.php?id=1
武汉京天电器有限公司成立于2010年,是智能机器人科教集成商,专注服务高校用户。致力于云操控智能协作机器人、数字孪生机器人、移动抓取机器人的销售以及系统集成工作。
团队来自高校,且只服务高校,深耕机器人行业。积极与高校用户开展科学研究项目合作,专业共建,筹建东湖Brain实验室,赞助行业学术会议,配合用户开展实验课程并联合出版教程,联合申报国家项目。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号