
在过去的十年里,对农业数字化的投资增加了十倍,到2026年,对该行业的资助将进一步增加五倍农业科技已经像金融科技和人力资源科技一样成为现实!风险管理是有效提高利润率和降低成本的关键工具--在农业方面,数字化使之成为可能。
农业是人类活动的一个知识密集型领域。农业技术人员与复杂的生物、工程系统和设备打交道。这种复杂性使得很多现代数字技术受到追捧,例如。
●无人机和机器人
●物联网
●地理信息系统
●虚拟现实系统
●数据科学工具
●区块链
●3D打印机
●计算机视觉
在这篇文章中了解更多关于无人机、机器人及其编程的信息。
无人机从何而来?
无人机开发领域是最密集发展的领域之一。造成这种情况的因素有很多,但关键的是无人机可以大大降低运营成本。庞大的领土和执行许多常规技术操作的需要使无人机成为理想的助手。

无人机与机器人有什么不同?
无人机一词的起源在语言学家中仍是一个争论不休的问题。这个名字被认为起源于1934年和1935年之交,当时低空飞行的飞机发出嗡嗡声,无法操纵或急剧加速,并发出独特的单调的嗡嗡声,就像无人机一样。无人机,从英文来看,确切地说是无人机。长期以来,只有目标无人机被称为无人机,但在20世纪50年代,特别是60年代,所有无人机,从巡航导弹到当时的无人飞船,都以某种方式自我认定为无人机。
什么是无人机?
这就是 ChatGPT 在人工智能的帮助下解释什么是无人机的方式:
无人机(四轴飞行器)是一种无人驾驶飞行器,可以自动或远程控制。它们用于各种应用,包括摄影、视频、航空摄影、航空扫描、现场评估、安全隐患检测、实地研究等。
无人机分为:
●飞行——飞机、直升机和混合动力型
●地面和地下——轮式、履带式
●漂浮 - 水下,水面
●展示无人机和家用无人机 - 用于娱乐和爱好
●组合 - 不同类型的无人机相互组合
根据应用方法,无人机可以是:
●单个无人机
●团体无人机
●集群无人机

人工智能生成的图像
飞行无人机分为三个主要亚种:
●飞机类型,由于机翼能够覆盖很远的距离;
●直升机类型,使用旋翼方案;
●混合动力飞行无人机结合了飞机机翼和直升机旋翼,能够切换到不同的操作模式。
无人机可用于农业;
●干燥(收获前植物组织脱水)
●喷洒农药、除草剂、杀虫剂等
●播种
●监控设备、花园和田地的灌溉系统
●着陆条件分析
●监控任务的执行
●领土的保护
飞行无人机非常有效,但地面无人机比它们有一些不可否认的优势。地面无人机的工作时间更长,在某些任务中更经济、更准确,而且用途更广、更安全。除了空中监视和远距离快速移动外,它们几乎可以执行与飞行相同的所有操作。
另外,我想指出组合无人机进一步发展的前景,组合无人机是比无人机更复杂的机器人。
机器人是一种执行编程动作的机构。他借助传感器、感应器、麦克风和摄像头感知周围的世界,并为特定任务建立行为模型,还可以以某种方式影响物理世界。
农业中的无人机和机器人
无人机和机器人如今在农业中得到积极应用。他们的任务各不相同:施肥、播种、用紫外线处理植物、监测田地、放牧羊群。以下是一些“在田间”使用智能助手的例子:
●上岸状况评估 无人机使用传感器收集数据,然后对其进行分析并向农学家发出问题信号。这种设备配备了一个机械臂,可以收集成熟的水果。如果在这样的无人机后面拉一辆推车,那么它仍然可以运来必要的药品;
●除草除草机器人可以在田间待上一整天——最多八个小时。他们有计算机视觉和燃烧杂草的特殊激光。他们不仅进行除草,还收集数据并将其发送进行分析;
●基于卫星和无人机图像分析的害虫攻击预测;
●苗木测绘观察、人工林灌溉;
救援无人机:一些无人机寻找生病的动物或植物,并向农民发出问题信号,从而使农作物和牲畜免于疾病和灭绝。

在“数字花园”图中的 RSHB播客中,Agrofly 初创公司的创始人兼首席执行官 Sergey Terekhin 谈到了如今俄罗斯农民购买无人机是否有利可图,还是租用无人机更好。还有 - 如何使用飞行机器人。
无人机程序员做什么的?
设计工程师设计、制造并测试无人机。另一方面,程序员开发软件,没有软件飞机将无法执行实际任务。大约 10 年前,无人机编程行业取得了重大进展,当时机器人操作系统 (ROS) 开源项目开发了用于编译机器人控制应用程序的库和工具。当时项目的创建者根本没有想过ROS的商业用途。ROS 现在被认为是构建机器人应用程序的领先操作系统。该平台为程序员提供了丰富的功能和工具、工作算法以及访问全球工程师和科学家生态系统的途径。
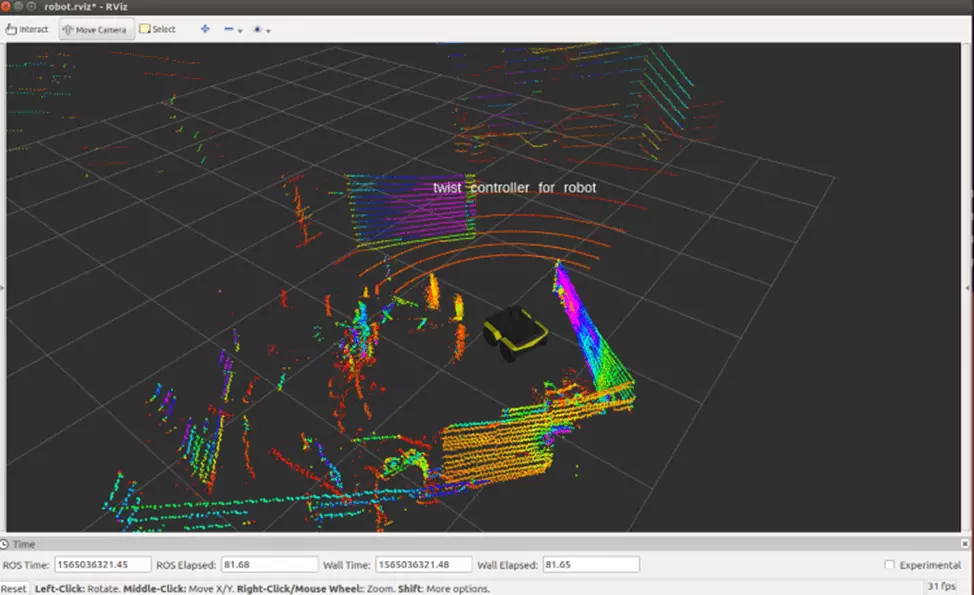
机器人操作系统确保传感器、3D 地图、安全路线规划器和 SLAM 的正确交互。软件环境由一组相互交互的独立节点(node)组成。主 ROS 节点是“主节点”。该模块的主要功能是注册其他应用节点。这些节点中的每一个都是一个 Linux 进程。ROS 系统提供了一种在各个节点之间同步和传递消息的机制。这些消息可以是传感数据、点云、视频帧、参数和控制命令。节点可以在不同的机器上运行,并通过网络接口进行通信。
按照ROS开发者自己的说法,设备编程不需要什么高超的技能,只需要具备嵌入式软件和控制系统的基础知识即可。因此,对于那些已经有编程经验的人来说,理解和开始开发无人机软件会容易得多。
无人机程序员做什么?
●为无人机的控制和导航系统创建软件
●开发控制系统的循环图
●模拟导航和飞行路径
●创建检测和绕过障碍物的系统
●制作空间地图
●维护和维护无人机软件
对无人机程序员的要求;
●精通C++或Python编程语言;
●使用 ROS 或 OpenCV 的经验
●优秀的技术英语知识;
●有为无人机或任何嵌入式软件开发算法的经验。
程序员使用地图帮助机器人和无人机在太空中导航。机器人的自主导航基于三个基本原则:
●建筑地图 - 制图;
●空间定位 - 本地化;
●路径规划;
绘图的任务是回答机器人的问题:“周围的空间是什么样子的?”在映射期间,来自各种传感器的数据被传输到机器人。根据处理后的数据,构建世界地图。
定位的任务是回答机器人的问题:“我在哪里?”在定位期间,机器人确定其相对于地图的位置,地图可能已经为机器人所知或实时生成。在先前已知的地图上进行定位时,无论机器人身在何处,都必须能够确定其位置。
路径规划的任务是回答机器人的问题:“我怎样才能到达目标点?”地图上的目标点可以由机器人操作员或机器人本身设置。机器人必须能够独立地在地图上铺设到目标点的运动轨迹并到达。此外,运动轨迹必须是最佳且安全的。
机器人编程的基本方法
●SLAM(同步定位和映射)是机器人技术中最流行的同步定位和映射方法。建图和定位之间有着密切的关系:在机器人周围的未知环境中,这两个过程不能分开。使用此方法时,机器人必须知道其确切的当前位置才能构建地图。他需要一张好的地图来确定他现在的位置。使用该方法的一个例子:操作员远程控制没有准备好的地图的机器人的运动,但使用传感器实时构建它并通过里程计和传感器在空间中定位。
●主动定位是一种主动定位方法,它使用路径规划来引导机器人到地图上的目标点来细化其当前位置(定位)。使用该方法的一个例子:机器人有一张准备好的周围空间地图,并自行移动到目标点(无需操作员自主)。同时,在移动过程中,机器人可以通过地图上的特定控制点,例如,为了固定位于墙壁上的特殊黑白标记,其身体上安装了摄像头。通过分析以这种方式看到的每个标记,机器人可以明确其在地图上的位置。
●探索是一种探索方法,它假设机器人能够确定其确切位置。该方法着重于机器人在未知环境中的高效运动,以实时构建地图。使用该方法的一个例子:机器人没有准备好的地图,在没有操作员参与的情况下独立移动。同时,机器人实时地为它移动到一个未知的领域,不断地构建地图并规划它的路线。
●SPLAM(Simultaneous Planning, Localization and Mapping)是一种结合了定位、建图和路径规划的方法。使用该方法的一个例子:机器人是自主的,没有准备好的地图,几乎没有关于它周围世界的现成信息。他实时独立构建地图,在地图上定位并计划他的进一步移动。
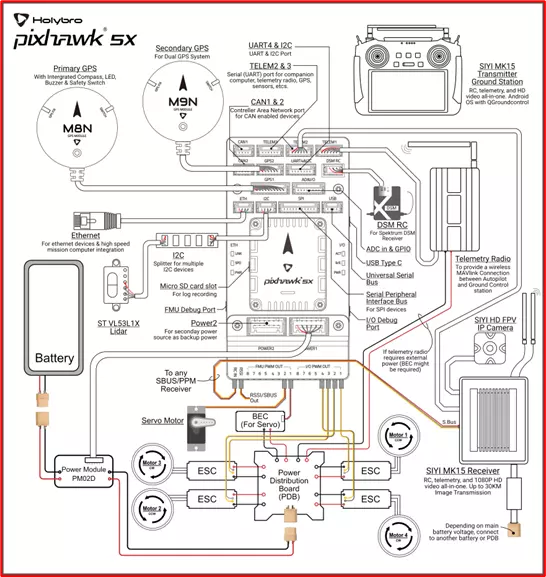
硬件
飞行控制器负责无人机的飞行和电机的转动。通用平台的一个示例是配备 ARM 处理器和 PX4 固件的 Pixhawk 板。固件代码以特殊的“循环软件”模式编译,允许您在 PC 上进行测试。
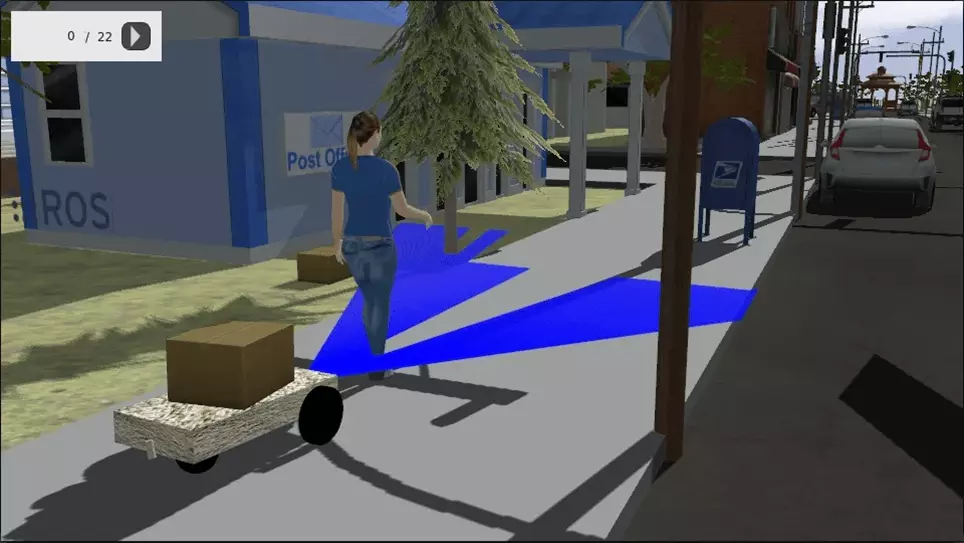
模拟
Gazebo软件真实模拟器用于模拟无人机的操作并对软件进行评估。
虚拟环境中的基础模型是虚拟机器羊多莉,作为对 Gazebo 和 ROS2 的动手介绍。多莉背着重物跟着你。该手推车配备两个电动轮子,使机器人能够使用激光扫描仪操纵和检测前方的物体。
资讯网
为了感知周围的现实,机器人配备了各种传感器,其操作也可以在 Gazebo 中建模:
●激光雷达
●深度相机
●激光/超声波/红外线测距仪
●接触传感器
●雷达
●加速度传感器
●陀螺仪
●磁力计
●气压计
机器人和无人机程序员的前景如何?
军事和工业部门、农业、制图、航空摄影、无人物流和其他领域都需要无人机软件开发人员。对这些职业的需求只会增长。
程序员可以使用以下细分行业:
●资讯科技公司
●四轴飞行器和无人机的供应商和制造商;
●国有企业
●机器人研究所
●执法机构(FSB、交通警察、FSO)
●军事部门
●工业企业(建筑、采矿等)
●运输公司和送货服务
●农场和农业公司












 粤公网安备 44010602004358号
粤公网安备 44010602004358号