为了在室内农业环境中部署无人机,需要额外的感知程度。SLAM是使用不同类型的传感器获取环境地图的原则,使机器人能够在构建地图中定位。为了能够实时执行这些任务,需要处理来自不同传感器的数据,因此计算能力需求正在急剧增加。这可能会成为一个严重的瓶颈,因为由于电源和重量限制,小型无人机没有配备足够的计算单元。因此,计算密集型过程被分配给地面站。然而,定位和测绘是计算繁重的任务,地面站的资源很容易耗尽,特别是当地面单元同时分配图像处理等其他复杂任务时。我们评估了两个单眼VSLAM,并检查了它们在这种情况下整合的可行性。
在实验和数据采集中使用的小型无人机是DJI Tello。它是一种廉价的现成平台,赋予单目相机2592×1936的图像分辨率。该平台可以在13 m的范围内飞行长达100分钟。对于其通信,它使用2.4 GHz的WIFI。为了控制无人机,分配了一台PC作为地面站。地面站被配置为在Ubuntu 18.04下运行ROS Melodic。图1显示了系统架构。导航数据和RGB图像数据传输到地面站。使用ROS,数据分别作为两种算法LSD-SLAM和ORB-SLAM的输入。

图1 ORB-SLAM和LSD-SLAM评估设置
为实验选择的室内农业环境是Fa. Duijnisveld公司的温室。种植的作物是甜椒。农场总面积为9公顷的温室,位于De Kwakel(荷兰)。选择的室内畜牧环境是位于兹沃勒(荷兰)的Mts. Van Leusen公司的奶牛场。这个奶牛场有90头奶牛用于牛奶生产。图 2显示了所描述的两个站点。之所以选择这些农业和畜牧业公司,是因为在那里进行的活动是劳动密集型的,并且可以从使用无人机执行多项任务的智能技术中受益。

图2.已经测试了视觉SLAM算法的研究地点:温室中的甜椒品种(左),奶牛场谷仓(右)。DJI Tello在两种环境中都显示了飞行
在温室内,种植的作物可能会有所不同,但一个共同的特点是它们都包含一个主要走廊。定义了一种飞行策略,使无人机在温室内飞行:行之间,这是监测作物的理想位置,以及主走廊,因为这是无人机执行转弯去下一排(和着陆)的地方。温室中的实验设置如图3所示。

图3 温室中的实验装置。作物行之间(顶部),主走廊(底部)。无人机的标题显示为红色,裁剪行显示为绿色,十字表示起点,箭头表示飞行方向
所有奶牛舍环境的一个共同特征是喂食巷,动物每天来吃几次。温室和谷仓之间的主要区别在于树冠稳定,动物可以在喂食巷中移动。理想情况下,这个工作空间将使用无人机自主监控动物的健康和行为。因此,了解算法在这种环境中的表现非常重要。奶牛场的实验设置如图4所示。

图4.奶牛场谷仓巷中的实验装置。无人机的标题显示为红色。一个飞行动作朝着小巷飞去,另一个飞向动物。十字代表起点,箭头代表飞行方向
图5显示了应用直接方法和基于特征的方法的无人机相机处理结果。ORB-SLAM仅采用关键功能,如左侧图片中的绿色方块所示;LSD-SLAM使用整个输入图像(右侧图片)。
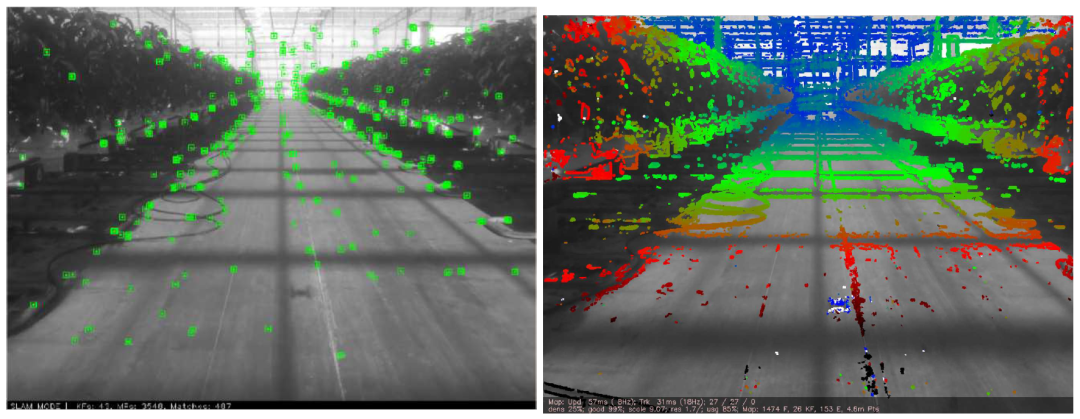
图5.ORB-SLAM(左)和LSD-SLAM(右)算法的可视化应用于无人机相机捕获的同一场景
为了测试所提设置的秤计算和定位性能,选择ORB-SLAM作为测试算法。这是因为根据结果,ORB-SLAM能够在聚类农业室内场景中实现绝对姿势误差和相对姿态误差方面的最小变化。对于这个测试步骤,在温室和奶牛场谷仓内设置了一个航点导航任务。为每个环境定义了两组航点:4点和6点。此外,在温室中,飞行高度设置为10m,在谷仓中设置为5m。对于测试步骤,选择了ORB-SLAM,因为ORB-SLAM被发现是变化最小的算法。图6显示了无人机飞行轨迹和参考轨迹的自上而下视图。
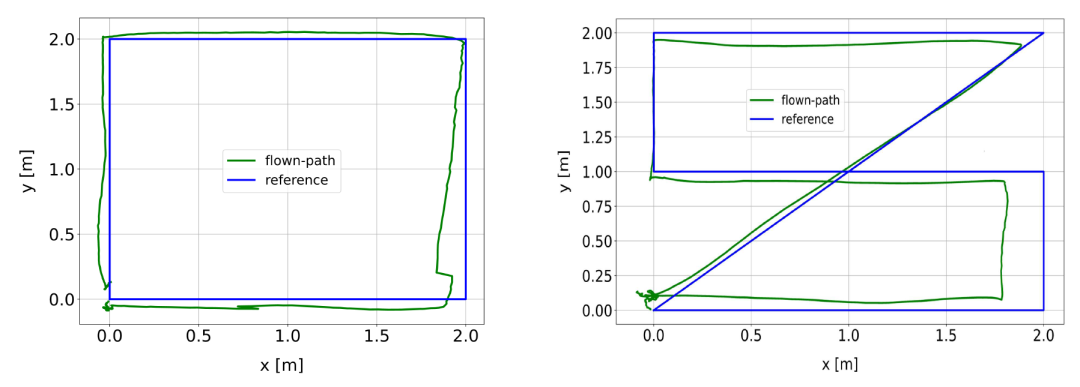
图6 温室中的四个航点任务(左)和奶牛舍中的六个航点任务(右)的俯视图
温室景观(主走廊)中的结果图如图7所示。作物行可以在八角图中可视化,用红色框表示。仔细检查图像时,混凝土地板也可见。由于地面上的纹理较少,障碍物地图中有一些松散的点,因为八角图使用从ORB-SLAM获得的点云。因此,发现只能可视化区域内的大型建筑元素,例如地板和墙壁元素(大于40厘米)。另一方面,无法观察到像单一作物叶子这样的小元素。

图7 使用ORB-SLAM构建的温室主走廊(左)障碍物地图(右)
在图8中,可以观察到与温室环境相比的进一步松散点。这是因为温室中要跟踪的功能比谷仓中的要多。此外,还发现直线,例如奶牛舍环境中的饲喂围栏,也可以检测到,而牛头的轮廓则无法清晰地检测到。此外,八角图的密度在飞行路径上变化(参见8中的蓝色方块),并且与蓝色箭头指示的位置相比,在蓝色方块中发现了更多细节级别。

图8 奶牛舍中的喂食栅栏(左)来自ORB-SLAM的风景障碍图(右)
在室内农业环境中使用ORB-SLAM和LSD-SLAM算法,无人机可以在相对较小的位置误差下实现定位和航点导航。最后,从无人机飞行生成的地图足以获得工作区的语义表示。这项研究显示了使用无人机进行植物和牛监测的概念验证,预算合理(不到150欧元)和计算资源。
源自:Drones 2021, 5, 41. https://doi.org/10.3390/drones5020041













 粤公网安备 44010602004358号
粤公网安备 44010602004358号