
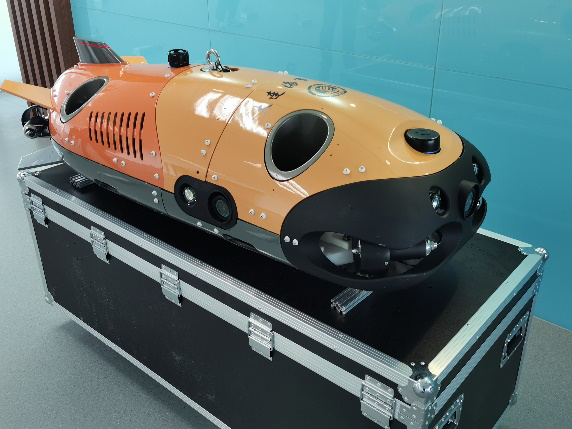
“海大大”号机器人
“海大大”号机器人是大连海事大学研发的第四代水下机器人,重约30公斤,最大深度可达200米,最大航速4节,无线方式可以3小时不间断工作。参赛队员介绍说,海大大采用八轴推进器,动力充沛,行动敏捷,控制稳定,不仅能够快速上升、下潜、灵活调整姿态,也可以完成侧翻、倒立等高难度动作。“根据去年参赛的经验,我们设计了全新的机械手,能够灵巧快速地抓取水下目标。具有定深巡航、声呐探测、水下目标自动识别等功能,可用于水下场景的观测,以及水下目标的智能检测与自主抓取。”
本次比赛的带队指导教师、大连海事大学轮机工程学院教授徐敏义表示,当前,水下捕捞机器人可较好地完成人机协同抓取任务,抓取效率较高且作业稳定性强,但针对无人监管的自主抓取作业,虽然当前可初步实现自主作业,但作业效率仍难以满足捕捞需求,仍需进一步提高自主作业效率。难点在于:动态浑浊的真实海洋环境为水下捕捞机器人自主作业带来极大挑战,机器人在浑浊水体中目标识别效率较低,精度有待提高;此外,水下目标形状、大小各异,自主抓取动作复杂,水下捕捞机器人作业难度大。“虽然水下捕捞机器人面临诸多难点,但经过全国各个单位的努力,已初步具备自主作业能力。大连海事大学已与多个单位达成技术开发委托协议,销售了多台水下捕捞机器人,合同额达415万元,具备丰富的产业化经验。”

袁国良接受大连电视台采访

“海星队”队员接受颁奖
混合AUV/ROV












 粤公网安备 44010602004358号
粤公网安备 44010602004358号