图2-4
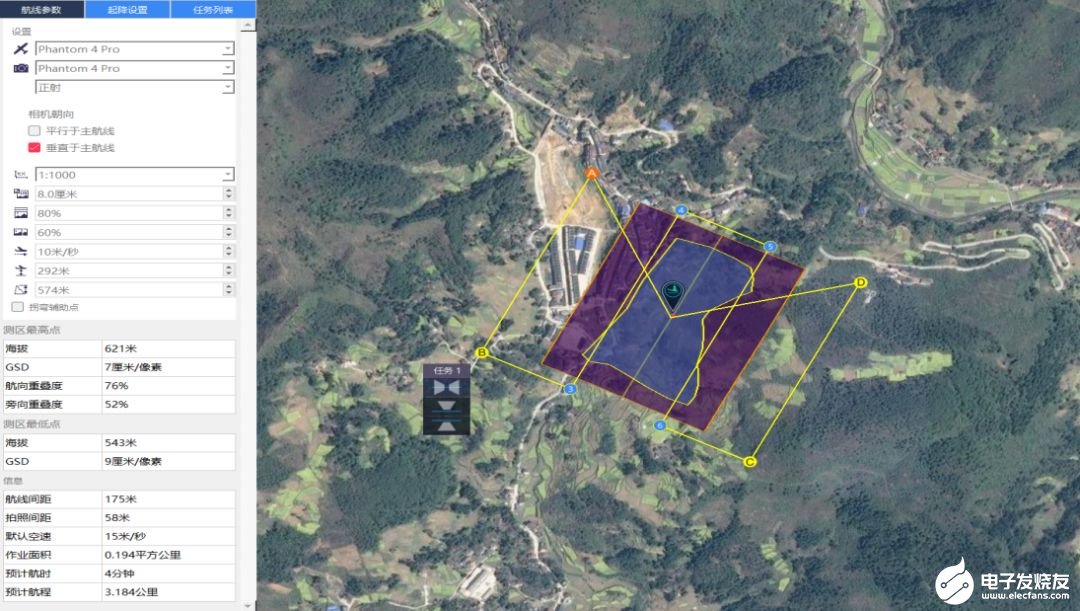
特别强调一下,所有的飞行参数必须在合理的范围之内,如果出现不合理的情况,则可能发生无人机无法起飞或者撞机等事故。在本次移民安置点航测工程中,我们要求最终提交1:1000的数字地形图成果,因此把航片分辨率设置成8cm,航向重叠度80%,旁向重叠度60%,以保证后期成图的质量。飞行区域以及航线生成完成以后,为了提高最终的成图精度,需要导出飞行航线,在航线的规划下,均匀的布置像控点和加密像控点。导出航线以后,找到飞行航线KML文件,然后导入到谷歌影像地图中。在导入飞行航线之后,接下来的步骤就是合理的布置像控点。像控点的布置遵守以下原则:
1、像控点需要选择明显的拐角处,以提高内业精度。
2、像控点标志尺寸大小应该在一米左右,最好布置成L形状,测量L点的拐角处。
3、像控点应该尽量选择地势平坦的地方,避免树林,房屋等容易被遮挡的地方。
4、像控点应该选择相对保存长久的材料,比如白色的油漆或者白色的涂料。且布置像控点的地方也尽量选择人流量小的地方。
5、像控点应该均匀的分布在测区的四周,对精度要求高的地方,应该格外布置加密像控点。
6、像控点尽量布置在两条相邻航线的中间,以便增加后期空三刺点的度数。
根据以上的布置原则,我们把整个测区的像控点布置成为如图2-5所示,其中1、3、4、5这四个点分布在测区的四周,属于基础像控点,6号点位于测区的正中间,属于加密像控点。这些像控点的布设完成以后,就可以利用华测X91移动站依次把每个像控点数据采集下来,并且做成标准的像控表格。

图2-5
3)调试飞机,调试相机参数
完成上述的像控采集工作后,就可以在测区的附近选择一个最近的起飞点。起飞点选择要求地势平坦,四周开阔,没有过多的遮挡且距离第一个拍照点200米以内。满足上述要求的起飞点才可以在第一个拍照点正常的启动拍照命令,否则会出现掉照片的情况。起飞点选择好以后,然后安装好大疆精灵4PRO的旋翼以及电池,进行飞行前的常规工作检查,保证不会出现人为的机械故障。检查完毕以后,最好进行一次手动操作的试飞。进行手动试飞的目的是调节相机的感光度和光圈,保证航片质量最佳。经过多次的综合测试,晴天的光圈建议选择5~7这个参数范围,ISO值选择200,阴天的的光圈建议选择2~4这个参数范围,ISO值选择400,这样的参数拍出的航片质量最好。
4)在翼飞智能无人机管理软件中正式飞行
完成试飞之后,可以开始在软件中正常飞行,巡航。首先无人机垂直上升,然后到达计算好的高度以后,水平飞行,向第一个拍照点前进。在到达第一个拍照点之后,开始调整姿态,沿着布置好的航线进行水平巡航工作。每个架次的飞行完成后,会得到若干张带像控点的航片,如图2-6所示。这个环节中翼飞智能无人机管理软件会全程监控无人机飞行的整体情况,监控的范围包括电池的剩余电量、实时图传、飞行高度、飞行速度等,并且全程会有语音提示。无人机从垂直起飞到水平巡航,再到最后的返航,整个过程在翼飞智能无人机管理软件中基本实现了全自动化。

图2-6
三、无人机航片在项目内业中的成图
外业航测完成之后,获得了一个架次的若干张航片,根据需求进行内业空三计算。我们把一个架次的航片,导入到GODWORK软件中,进行空三内业处理,具体的空三步骤如下:
1、对导入的航片进行一键空三操作,进行影像的识别、匹配。
2、影像匹配完成以后,我们需要对影像进行DEM构图。
3、构图完成之后,再导入像控点,依次对像控点进行刺点。
4、完成两个或者三个刺点工作之后,对整个构图网进行平差。如果平差之后构图网没有破坏,继续重复步骤3中的刺点工作。
5、所有的像控点刺点完成,平差合格之后,输出测图模式。
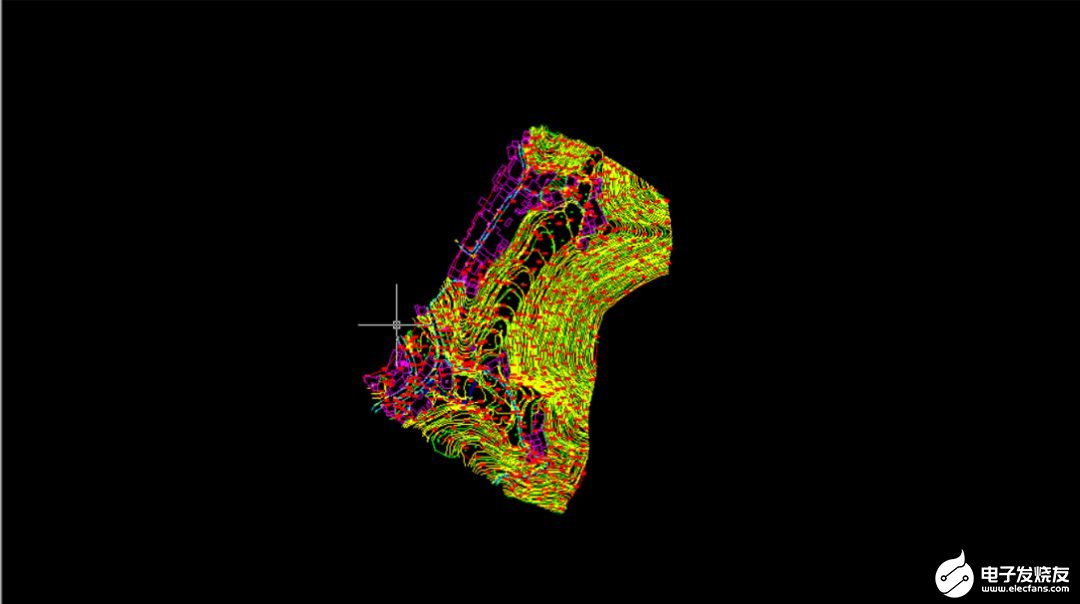
输出了测图模式,然后把测图模式输出的成果导入到生成立体相对的软件中,生成立体像对,然后对每个像控点进行依次检查,校核,并且输出相对成果。最后利用已经生成的相对,绘制出1:1000的数字地形图。输出的成果如图3-1所示。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号