升级:移动AGV协作机器人
但是对于集成商或者终端企业而言,更希望找到一家能提供机械臂、AGV、视觉等一站式采购服务的供应商,所以就有了复合型机器人的“升级版”——移动AGV协作机器人。这种机器人不需要集成商再去二次开发,直接用一个控制器解决所有部件,多快好省,一步到位。
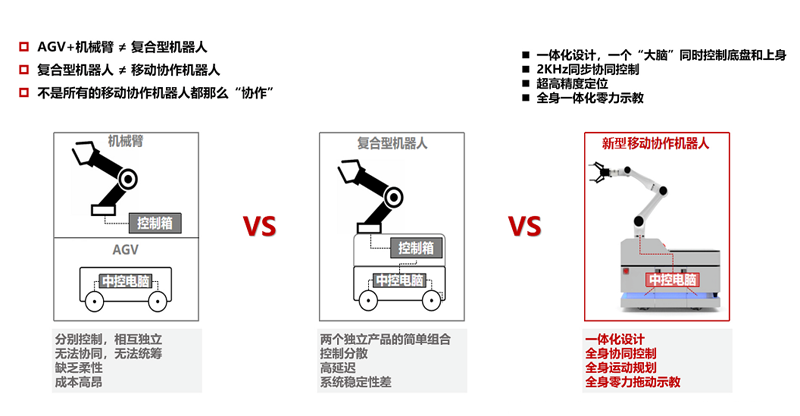
AGV复合型机器人与移动AGV协作机器人的区别
2020年2月4日,UR和MiR宣布将在丹麦新建一座全球最大的移动AGV协作机器人中心,两家业内领先企业强强联手,瞄准新市场、新需求。
与此同时,国内的同类型产品大部分属于是AGV与机械臂的简单组合,并非移动协作机器人。这是因为除了合作双方要在某些技术难题上开诚布公外,真正一体化设计的移动AGV协作机器人,对整体的控制算法要求非常高。
以终端控制为例,目前较为流行的操作方式是示教编程,也就是拖着机器人先演示一遍动作,但是对于AGV复合型机器人而言,并不可行。
因为现在的AGV,业内的普遍定位精度为±5mm到10mm左右,往往只能将机械臂送到一个大概的位置,也就是说机械臂每次来的地点不一样,所以集成商一般会用视觉进行辅助定位,这大大增加了计算难度和成本。
目前有些厂家在做CNC车间项目时,用的是双视觉辅助定位法,因为AGV只能将机械臂运送到大概的位置,但是视觉又有视野范围,精度越高视野范围越小。所以我们做了粗、精两级定位。还有就是整个的流程控制需要PLC协调处理,需要对视觉和软件进行二次开发。”
目前,国内已出现专门做新型移动AGV协作机器人厂家,其移动机器人底盘使用麦克纳姆轮,能够做到±1mm的重复定位精度。对于操作位置固定的应用,如机床上下料、组装等,±1mm的精度已经满足大部分场景的精度要求,此时无需视觉进行二次定位,可直接把移动AGV协作机器人上的机械臂当做固定机械臂来用,提升生产效率,同时为客户省去视觉模块的成本。
但是麦克纳姆轮由于材料问题,导致造价、维修成本过高,而一般的本体构造精度又难以满足,所以工业场景还在等待技术突破。
分支:大型类人型服务机器人
工业场景注重稳定性,但是交互功能的突破能否让移动AGV协作机器人摇身一变,未来演变成为家用大型仿人服务机器人的突破口。
在业内人士看来,基于人工智能技术的升级、优化,服务机器人产品类型愈加丰富,自主性不断提升,目前,国内服务机器人的种类,已经由市场率先落地的扫地机器人、送餐机器人向情感机器人、陪护机器人、教育机器人、康复机器人、超市机器人等方向延伸,尤其是家用服务领域和服务对象正不断拓展。
现在,很多小型家用机器人主要还是以互动、陪伴等功能为主,还不容易实现物理交互。而未来的大型仿人服务机器人,将更多地替代家中一些简单、重复的劳动工作,真真正正地为人们的日常生活做一些事情。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号