
随着国家海洋战略的逐步落实,对海洋的探测和海洋资源的开发利用提出来更高的要求。现在人类对水下的作业主要依靠水下机器人,水下机器人按使用方式主要分为载人潜水机器人、无人自主水下机器人(AUV)和无人遥控机器人(ROV)。由于载人探测机器人具有极大的危险性,所以将人的安全保障放在首位,相应体积和重量都很大,必须配备复杂的运载、布放和救生系统,其使用受到很大的限制。对于资源探测和搜救视察,小型的ROV和AUV小巧灵活,便于布放和使用。所以具有良好的人机交互控制性能、实时探测和处理能力强的ROV是浅水水域水下机器人应用的主流。
项目简介:
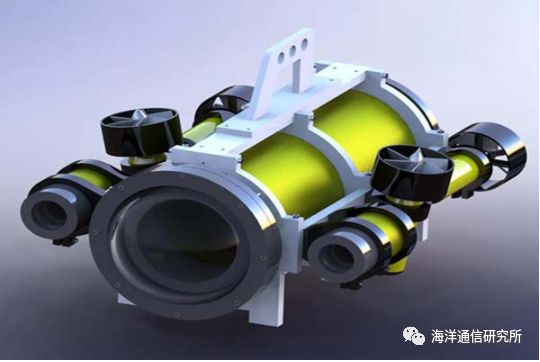
本项目设计制作适用于近海及湖泊100米以下水域探测的ROV水下机器人。流线型的设计使ROV机器人在水下作业时,既可以通过脐带缆供电源也可以通过蓄电池工作,连接光纤经岸上的无线路由器设备,将图像以及温度等水下状况传输至手持设备,以代替人工下水作业,大大减少了水下探测的危险性。结合我国目前的海洋战略,本ROV价格低廉,更适用于民用水下探测与作业。并且通过手持安卓设备在水上对ROV进行操作,方便简洁。
项目创新点:
1 自主设计了磁耦合推进器,使ROV具备更深的下潜深度。
2 使用光纤进行数据图像传输,实现了画面和指令的同步传输。
3 开发了安卓端APP作为地面站,操控方便。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号