
Eelume意味着海底机器人能力的飞跃。它是一种模块化、灵活的机器人, 能够像蛇一样移动, 或被常规推进器推动。Eelume设计用于驻留在海底, 以便对人类难以维护的海底设备进行快速响应的检查、维护和修理(IMR)。
Eelume诞生背景
随着科技的不断进步, 人类对于能源的需求不断增长, 传统的石油和天然气开采也面临越来越大的压力。因此, 带动的石油和天然气行业对用于海底安装的检测,维护和修理(inspection, maintenance and repair,IMR)的新型创新解决方案的需求也日益增长:
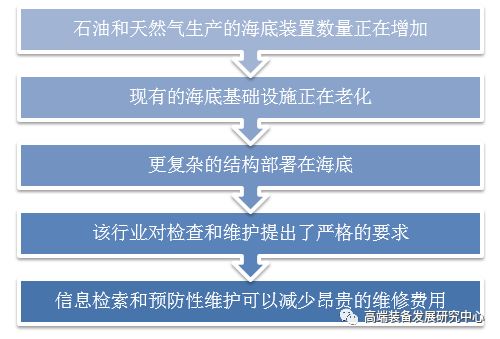
目前, 海底石油和天然气工业中的IMR操作使用从大型水面船舶部署的ROV(remotely operated vehicles)进行。这些业务的主要成本来自于水面船舶, 水面船舶的租用费用非常高。石油和天然气运营商每年都会遇到与租用水面船舶相关的大量费用, 以便为现有的海底设施上提供持续的IMR能力。为了降低IMR成本, 石油和天然气公司因此非常需要减少水面船舶的使用。
海底常驻是减少对基于水面舰船的ROV作业需求的关键, 从而降低目前的IMR成本。常驻IMR解决方案可以永久安装在海底设施上, 并根据需求定期进行IMR。
本文介绍了Eelume潜水器的概念和第一个Eelume原型的发展。除了作为海底驻地之外, 它的铰接式结构允许潜水器结合几种更传统的海底潜水器的功能, 从而涵盖了广泛的操作场景。
Eelume AS公司位于挪威特隆赫姆,与NTNU、挪威国家石油公司和康斯堡海事公司合作, 为石油和天然气运营商生产常驻IMR机器人。
Eelume潜水器的概念
Eelume的名字来源于鳗鱼, 能够照亮海洋的黑暗凹陷。
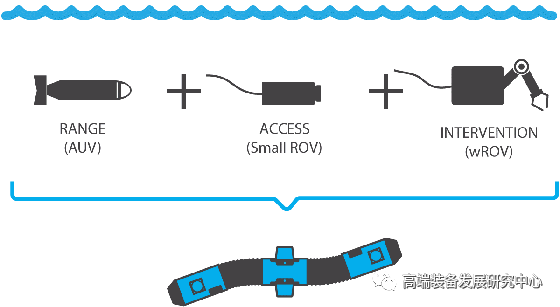
Eelume概念如下图所示, 在挪威特隆赫姆NTNU和SINTEF的蛇机器人研究领域进行了10多年的研究。这个概念涉及一种新型的柔性海底潜水器, 其包括一系列接头、推进器模块和各种有效载荷模块。该产品的独特之处在于其改变形状的能力。它具有灵活性和超级冗余性, 这是以前在石油和天然气业务的商业检查和干预潜水器上所不具备的。
Eelum的概念
形状改变能力允许该潜水器本身充当机器人手臂。与现有的ROV相比, 灵活的主体和狭窄的横截面拥有显著的优势,具备进入现有ROV无法进入的海底受限位置中执行IMR的能力。在检查和干预任务期间, 该潜水器可以通过沿柔性体安装的管道侧向和垂直推进器悬停。
该潜水器的狭长机身还可以像巡航AUV那样长途运输(假定潜水器是无绳的并且由电池供电)。因此, 该产品结合了现有ROV的IMR能力和现有AUV的巡航和勘测能力。其灵活性及其覆盖大范围运营场景的能力使之成为海底常驻IMR解决方案的理想选择。
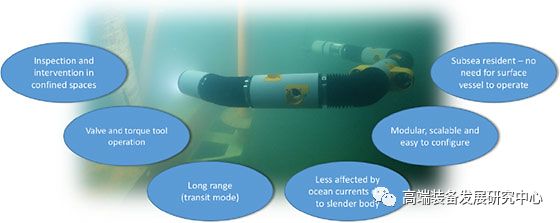
Eelume潜水器概念的优势
Eelume潜水器原型
第一批Eelume原型如下图所示, 并于2016年开发并展示。此次展示的目的是验证并演示该潜水器在实际海上环境中的基本功能。

原型模块中两种不同的潜水器配置
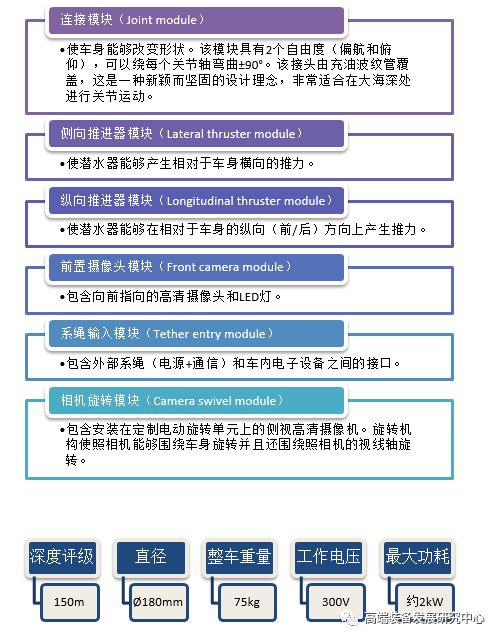
该原型的深度等级为150米, 其主要功能是向运营商提供实况高清视频。潜水器通过系留连接从顶部操作站供电。该系绳还包含一条通信光纤。
设计者通过模块化概念来提高该潜水器的灵活性, 并根据不同的操作要求简化其配置。共开发了六种类型的模块, 所有模块具有相同的机械和电气接口, 使模块可以互换。上图展示了六种类型的模块, 以及通过这些模块的不同组合实现的两种不同的潜水器。
2016年, 挪威对原型进行了深入的测试, 其中包括多次深度达150米的海上试验。测试已取得成功, 验证了该潜水器的主要所需功能和基本设计概念。


2016年11月在Trondheim以外的船上进行的潜水器测试

潜水器靠近76.5米深处的海床
视觉深度传感器安装在相机视图中,用来观测潜水器是否下潜到目的地

在Trondheim LBO干船坞进行测试期间,潜水器在水下结构之间移动

潜水器使用U形工作模式检查水下结构,尾部的旋转摄像头为头部的移动提供视野
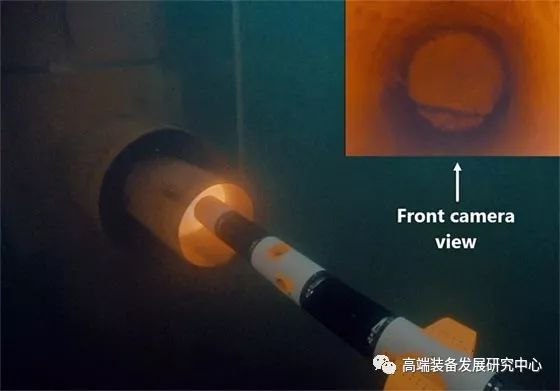
在狭窄的管道结构内检查
右上角的图像显示前置摄像头模块的视图。进入和检查这种狭窄结构的能力要求潜水器具有非常窄的横截面。这个画面因此说明了潜水器的独特能力。
Eelume概念未来的发展方向
Eelume的后续版本将引入新功能。第二型将于2018年底进行演示, 其深度评级为500米, 并配置为轻型干预。它将能够根据需要操作扭矩工具、清洁工具和其他任务。扭矩工具的操作可以通过利用潜水器的双臂性质进行: 手臂的一端可以抓住以固定潜水器, 而另一端可以操作该工具。

扭矩工具操作中,其中抓手的一端抓住以固定潜水器,另一端进行操作
第三代Eelume将能够进行无绳操作。它将配备内置电池和车载处理器, 使潜水器能够在各个结构之间自主转换。接近海底平台时, Eelume将在靠近结构时与无线宽带双向通信进行连接。在这个阶段, 操作员可以接管控制。
Eelume将驻留在靠近海底平台或海底工厂等水下环境中。运营商有时需要临时通知IMR功能, 特别是在紧急关闭的情况下。通过位于海底平台和设备附近的Eelume潜水器, 以往等待ROV到达现场时的时间将不复存在。
海底平台基座将被配置为通过无线接口向潜水器提供动力和通信。开发者的长期计划是让Eelume一次保持长达6个月的原位待定时间, 这需要灵活的设计, 包括可交换工具的存储。
网络通信和电力可以通过连接到运营商的海底网络来提供。另外还可能利用浮标作为通信网关和电源, 理想方式的是通过可再生方法产生能量。

多个Eelume潜水器的对接解决方案图
该图所示的停靠概念也适用于传统鱼雷形巡航AUV。
结论
Eelume具备了其他水下航行器不具备的能力。它可以是待机、自主或由操作员控制, 也可以改变其形状以适应当前任务的要求。作为常驻海底机器人, Eelume可以进行日常检查和维护任务, 也可以用于紧急干预。Eelume将扩大现有的方法和技术, 为运营商降低运营成本和总体成本。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号