
企业的业务部门正在部署无人叉车,以抵消日益增长的订单和无法获得足够的熟练操作员的压力。具有讽刺意味的是,尽管企业非常需要机器人,但事实证明,机器人需要人。
无人叉车的一个基本逻辑常常被忽视:通常需要某种程度的人类监督和协助。
即使是设计成完全自主模式的无人叉车,也会碰到某种特定的搬运任务和异常情况,这需要以人类的支持作用为特点。此外,"双模式 "叉车能够自主操作,其设计使训练有素的操作员能够登上设备并利用它完成临时任务。
可以肯定的是,企业对无人叉车的需求将减少对叉车操作员的需求。但是,人,仍将在无人叉车的许多部署中发挥一定作用。
无人叉车供应商维克纳机器人公司(Vecna Robotics)的创始人、致力于机器人技术互操作性的行业组织MassRobotics的联合创始人Daniel Theobold说:"人类和自主车辆在很多方面都有密切的联系。思考这种联系的一种方式是作为监督者与被监督者的关系。机器人很聪明,但它们不是魔法。它们将需要一些帮助和监督,就像人类工人需要帮助和监督一样。”
作为其自主解决方案的一部分,Vecna提供了车队洞察的软件,以及远程支持和监督服务。Theobold说自主技术是成熟的,但供应商在远程支持和异常处理机制中建立起来是有意义的,因此如果出现意外问题,支持人员可以迅速解决问题。
Theobold说:"对于异常处理,首先,你必须有一个足够聪明的自主系统,知道它什么时候需要帮助,然后你需要有一个系统,让机器人能够非常迅速地获得帮助。"
简而言之,作业越来越需要无人叉车,但自主车队需要人类的支持才能顺利工作。此外,越来越多的无人叉车类型和使用案例正在出现,有些具有双模式操作。对于几乎一直以完全自主模式运行的无人叉车车队来说,车队主管的角色最终可能会由以前的叉车操作员担任。
特殊情况处理
供应商说,在理想的条件下,如封闭的过道、完美的负载和原始的托盘,无人叉车的自主性运作良好,但条件往往不那么理想,导致需要在线支持和特别处理。
Theobold说:"关键是要认识到例外情况是特殊的,你需要能够迅速解决任何问题,以确保车队的安全性和可靠性。"
Theobold说:”人类支持人员具有认知技能和智慧,可以帮助机器人做出良好的、安全的决定。人在回路中的方法比调整自主平台以忽略那些不太可能成为危险但如果被平台完全忽略则有可能成为实际危险的输入更可取。最安全的赌注是让人帮助解决异常情况,以保持性能正常。"

Theobold说:"实际上,只要机器人完成了它们的工作,达到了预期的产量,客户并不真正关心异常情况是在机器人的头脑中解决的,可以说,他们是在得到人类的帮助。"
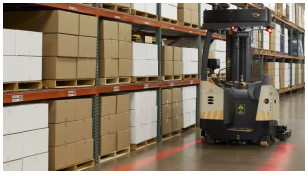
在实践中,人类参与机器人升降车的程度往往是特定的应用,并可能受到环境控制程度的影响,科朗设备公司(crown)全球自动化和新兴技术总监Jim Gaskell指出,该公司提供具有双模式功能的无人叉车。
Gaskell说:"自动和手动操作的组合在很大程度上取决于叉车类型和应用。一些应用被设计成将自动驾驶车辆隔离在过道内或仓库的特定区域内,人工操作只用于处理干预,如产品或车辆异常。其他应用,如自动运输,在一个结构化程度较低的环境中运行,因此车辆更有可能遇到需要人工干预的情况。"
Gaskell说,CROW的 "双模式 "牵引车可以在大部分时间内自主运输一列小车,而且可靠性很高,但在多达10%的时间内,受过训练的操作员可能会出于各种原因驾驶车辆,包括绕过意外障碍物或完成一次未计划的交付。其他原因可能包括将牵引车开到手动充电站,或开到维修区,或任何它需要到达的不在其设定路线上的地点。
Gaskell说:”虽然双模叉车具有灵活性,但在实践中,绝大多数时间都可以实现自主操作,将训练有素的操作员解放出来执行其他任务,同时从自主车队获得最大价值。”
Gaskell说:"在一个典型的双模前移式叉车应用中,车辆的手动操作只是为了导航到充电站或维护区,或者从导致车辆暂停自动操作的异常中恢复。避免了涉及托盘移动的手动操作,这样它几乎100%的生产时间都是在自动模式下进行的。"
叉车的自主化的另一个人为因素是,无人叉车的管理经理往往可能是前叉车操作员,因为他们对托盘工作流程有亲身体会。
Gaskell说:"这个新角色为现有的叉车操作员提供了一个自然的职业道路。从事自动导引车工作的员工必须充分了解与自动和手动操作相关的操作和安全要求,因此,现有的叉车操作员有一个先机。现有的操作人员也将很好地理解负载质量,托盘是如何堆放和装载的--这是成功实施自动化的一个关键因素。"
越来越多的选择
在成本较低的自主叉车领域,正在出现一些解决方案,以解决临时性、低产量任务的自动化需求。

例如,今年早些时候,Vecna和Big Joe合作,推出了自主托盘叉车Vecna CPJ。Big Joe提供了自己的自主托盘升降机版本,被称为Big Joe "BUD"。
该设备是一种协作式或”协作机器人托盘叉车“,之所以这么说是因为它可以使用Vecna的技术在完全自主的模式下操作,但在有意义的时候也可以手动操作。Big Joe公司的首席营销官Bill Pedriana说,Big Joe公司以传统的托盘叉车、站驾式托盘叉车和其他叉车产品而闻名,在设计托盘叉车时考虑到了自主性,加入了锂电等功能,以方便充电,外形紧凑,低矮的货叉部分使其更容易自主地搬运货物。
Pedriana说:”总的来说,协作机器人托盘叉车的设计填补了一个未得到满足的需求:自主托盘移动量较小,通常是临时性的任务,由一线工人决定是否需要启动该任务。如果没有自主式托盘叉车,大多数操作最终会让工人手动操作传统的托盘叉车或站驾式托盘叉车,这可能会在 "行程 "上消耗大量的劳动时间:将货物从A点移动到B点的时间。”
Pedriana说:"有很多工作流程在本质上是偶然的!当有人确定是时候移动它时,货物就可以被移动了。这可能是一个设施的另一侧的维修活动的零件请求,或将在制品负载从一个区域移动到另一个区域,或移动垫料,或移动空托盘负载。我们称之为'用户导向的自动化',因为货物需要按需移动,由工人决定,但你宁愿让工人留在原地,做更高附加值的任务。"
Pedriana说:”Vecna和Big Joe的自主托盘叉车的任务和目的地点可以在软件中配置,而不需要将协作机器人集成到仓库管理系统。每个机器人上的集成平板电脑可以用来选择和启动任务,一旦任务建立起来。随着机器人即服务(RaaS)在这些设备上的应用,协作机器人的适度月费为更广泛的用例和细分市场打开了通往叉车自主性的大门。”
他说:"我们最初的设备的重点是中小型企业,因为它提供了一个平易近人的价格点,可以在这些较小的、由用户指导的工作流程中获得回报,或者作为一种方式,在大型的、较高的操作中实现低速和较不频繁的任务自动化。”
共享的自主权
Third Wave Automation(第三波自动化公司)是另一个叉车自动化解决方案的供应商,它相信混合模式无人叉车的价值,支持远程监控和完全远程操作其叉车。Third Wave Automation的产品负责人Matt Willis称,在Third Wave所谓的 "共享自主权 "概念下,这是一种 "多模式 "无人叉车方法。
Willis解释说,在这种方法下,无人叉车几乎可以一直在自主模式下运行,尽管使用Third Wave的自主平台,位于物流中心的人类可以监督许多叉车,并在无人叉车遇到意外情况时进行干预。在繁忙、动态的仓库中,意外情况是可以预期的,因此自主平台应该准备好应对这一现实。
Willis说:"例如,当无人叉车应该放置另一个托盘的位置上已经有一个托盘时,应该怎么做?人工操作者善于解决这样的问题,所以我们的方法是把人放在回路中,这样,如果我们的无人叉车遇到一个没有明确答案的情况,操作者可以非常迅速地介入并提供指导,随着时间的推移,自主系统会从中学习。"
对于其第一台无人叉车,比如前移式叉车,Third Wave Automation与Clark Material Handling(克拉克物料搬运公司)合作,使用他们的一台前移式叉车作为基础。Willis说,在大多数情况下,管理自主车队的人将与叉车在同一建筑物内,但人在办公室里。

Willis说:"我们相信,由经验丰富的操作员远程监控车队,并在发生异常情况时进行管理,是让人类和机器共同完成仓库任务的下一步。你可以将你最好的操作员的经验与自主系统的能力相结合,以实现你所寻求的性能和效率水平。"
Third Wave公司的自主前移式叉车可以手动操作,既可以自主运行,也可以使用遥控技术,以完成可能出现的临时性任务。然而,Willis补充说:"通过让一个人支持多个自主设备的输出,叉车的自主性获得了最大的好处。"
他说:"实际上,我们的系统赋予了操作员超级权力。一个操作员现在能够同时监督和操作多辆叉车,这在以前手动操作的叉车上是不可能的。"
高密度自动化
The Raymond Corp (雷蒙德公司)自动化产品营销经理Martin Buena-Franco说,虽然无人叉车存在人与人之间的互动,包括让工人通过呼叫盒通信召唤无人叉车,一些无人叉车具有双模式功能,以及车队监控,但目前高密度存储区的托盘移动趋势是完全自动,并直接集成到仓库管理系统中。
对于这些高密度的环境,Raymond 提供了其自动转运堆垛机和自动前移式叉车。Buena-Franco解释说,这些系统旨在以全自动化模式使用,直接从仓库管理系统接受指令,在非常狭窄的过道、高密度的存储区域实现最大效率。
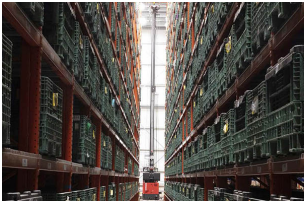
自动堆垛机在过道上时,可以从轨道上的电力机制中获取动力。Buena-Franco补充说:"这意味着每天有20%或更多的托盘移动。自动前移式叉车可以自主地从一个过道移动到另一个过道,而不需要人工协助。"
Buena-Franco说:"仓储和存储的趋势是往高处走,也有更窄的过道,以实现更大的密度和空间效率。当你把这一点与其他行业的压力以及自主技术和软件的进步结合起来时,指针已经更多地从制造或配送中心的地面向完全自主的方向移动,进入非常狭窄的过道存储仓库。"
Buena-Franco说:"无人叉车的适用性取决于订单量和场地寻找操作员的难度等情况。然而,他补充说,许多两班制或三班制作业的过道布局非常狭窄,净空高度较高,可以从完全自主的叉车中获益,其效率和准确性的提高可以与更昂贵的自动托盘存储和检索系统相媲美。"
Buena-Franco说:"为非常狭窄的过道环境设计的自动升降车最好与仓库管理系统集成部署。这样,叉车就可以直接从仓库管理系统中接收工单,并保持物理库存的同步。工单也可以分批进行,以进一步减少自主执行的行程和时间。底线是,一个完全集成的系统可以潜在地优化操作。"
美国Vecna Robotics提供物料搬运和混合实现以及工作流程优化解决方案,这些解决方案具有由我们的学习自主栈操作的自动驾驶车辆。我们的解决方案为分销,电子商务,仓储和制造领域的客户创造价值。我们独特的编排引擎技术Pivot.al允许不同类型的机器人和人类无缝协作,并灵活地产生自适应业务解决方案,能够满足日益不可预测的市场需求。我们的技术超越了传统的自动化,专注于最大程度地提高人和机器人的能力,以创造令人满意的工作,提高生产率并鼓励创新。
我们的目标是通过提供最佳的自动化技术来革新客户的生产力。当人机交互工作流程可以轻松适应不断变化的环境和需求时,我们将创建一个持续的改进周期,从而为我们的客户带来可观的,持续的价值。
我们梦想着有一种更好的方法来完成工作。一种让人类成为人类,让机器人成为机器人的方法-一起工作。通过将工作流程放在机器人上,我们确保所有零件和播放器都能完美互补。那是一种将事实置于虚构之上的未来主义视野。













 粤公网安备 44010602004358号
粤公网安备 44010602004358号