美国加州大学河滨分校设计的一种漂浮的机器人薄膜可以被训练来清理海上的石油泄漏或清除饮用水中的污染物。
该薄膜以光为动力,以水为燃料,可以无限期地部署到偏远地区进行清洁,因为在那里用其他方式充电会很困难。
"我们的动机是使软体机器人具有可持续性,并能够自行适应环境的变化。如果用阳光做动力,这个机器是可持续的,不会需要额外的能源,这种薄膜也是可以重复使用的。”UCR化学家李志伟说。
研究人员将这部电影命名为Neusbot,因为Neustons是一类包括水黾的动物。这些昆虫以脉动的方式穿越湖泊和缓慢流动的溪流的表面,就像科学家们用Neusbot实现的那样,它可以在任何水体上移动。
虽然其他科学家已经创造出了对光线有反应的薄膜,但他们还不能产生Neusbot所能做到的可调节的机械振荡。这种类型的运动是控制机器人的关键,让它在你想要的地方和时间发挥作用。
这项成就的技术细节在一篇新的科学机器人学论文中进行了描述。
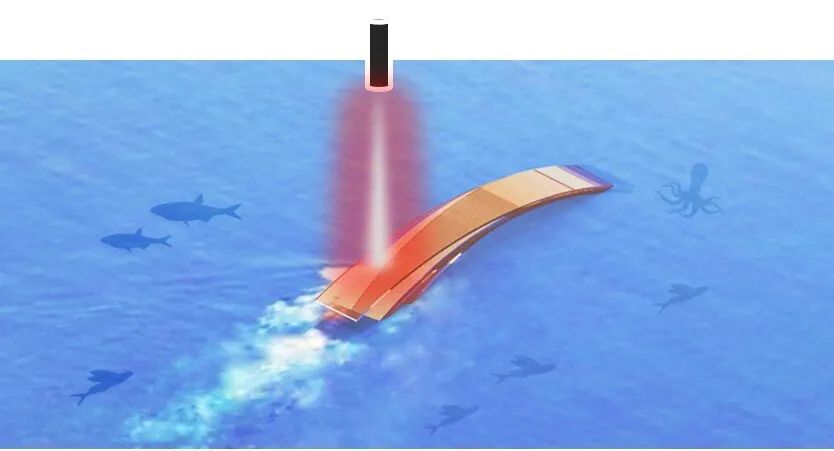
"利用光实现这种可控运动的方法不多。我们用一种表现得像蒸汽机的三层薄膜解决了这个问题,"Li解释说。
来自沸水的蒸汽为早期火车的运动提供了动力。这也是为Neusbot提供动力的类似原理,只是以光作为动力源。薄膜的中间层是多孔的,容纳水以及氧化铁和铜纳米棒。纳米棒将光能转化为热能,使水汽化,为水面上的脉冲运动提供动力。
李说:”Neusbot的底层是疏水性的,所以即使海浪压倒了薄膜,它也会浮回水面。此外,这些纳米材料可以承受高浓度的盐分而不被损坏。我对它们在高盐环境下的稳定性充满信心。“
Li和UCR化学教授Yadong Yin专门用纳米材料制作机器人。他们通过改变光源的角度来控制Neusbot的方向。仅由太阳提供动力,机器人将简单地向前移动。有了额外的光源,他们可以控制Neusbot的游泳和清洁的位置。
当前版本的Neusbot只具有三层。研究小组希望在未来的版本中测试第四层,它可以吸收油,或者吸收其他化学品。
"通常情况下,人们会派船到漏油现场用手清理。Li说:"Neusbot可以像机器人吸尘器一样做这项工作,但是在水面上。
他们还想尝试更精确地控制它的振荡模式,并让它有能力进行更复杂的运动。
他说:”我们想证明这些机器人可以做很多以前版本没有实现的事情。“












 粤公网安备 44010602004358号
粤公网安备 44010602004358号