牛津技术解决方案公司(OxTS)已发布了该公司惯性导航系统(INS)系列中的最新产品。xNAV650是OxTS迄今为止最小,最轻,最实惠的INS,将最先进的MEMS IMU(惯性测量单元)技术与测量级GNSS接收器相结合,可为无人机(无人机)测绘提供可靠性和精度和测量。

所述xNAV650提供绝对位置,定时和惯性测量(航向和俯仰/翻滚),其可以与来自其它设备,如激光雷达传感器和照相机的数据被组合以大大地提高了测量过程的结果。它的尺寸为77 x 63 x 24 mm,重量仅为130 g,是SWaP(尺寸,重量和功率)受限的无人机平台的理想选择。
OxTS的合作伙伴Dronezone已将xNAV650 INS与Velodyne VLP-16结合使用,对老化的桥梁进行了扫描,以查找过度生长的叶子造成的结构和潜在危害。通过OxTS的Georeferencer软件将来自INS的定时,位置和惯性数据与Velodyne VLP-16的原始数据融合在一起,测量师能够生成桥梁的高精度3D点云。
通过数据融合,可以在树叶,电线和桥梁侧面看到出色的清晰度。由此产生的点云使工程师能够轻松,准确地确定需要密切关注的桥梁区域。
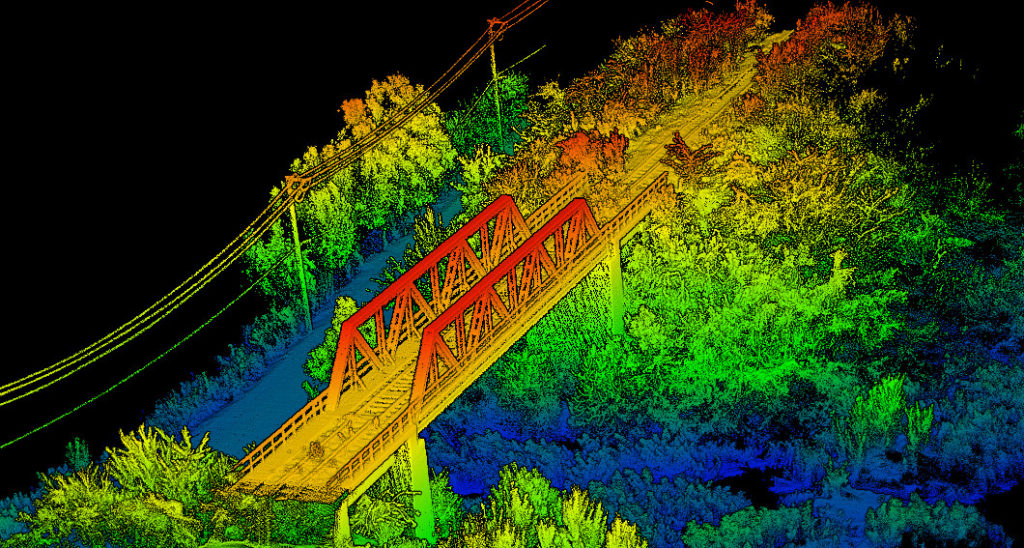
桥梁勘测的Pointcloud,用于帮助识别长满的叶子OxTS INS的数据可与几乎所有LiDAR传感器的数据融合,OxTS Georeferencer软件可用于对Velodyne,Hesai和Ouster传感器的点云进行地理参考。OxTS目前正在努力将来自更多制造商的新型LiDAR传感器集成到OxTS Georeferencer中,从而使用户能够构建一个完整的导航解决方案,其中许多集成工作已得到解决。
xNAV650是多种无人机制图和测量应用的理想选择,其中包括:
桥梁勘测
建筑测量
沿海监测
林业调查
地图制作
管道勘探
铁路勘测












 粤公网安备 44010602004358号
粤公网安备 44010602004358号