来自美国密歇根州立大学的曹昌勇教授说,这种混合型柔性抓手比传统的纯软手能产生更大的抓力,并且对于精确的操作更稳定。
用于工业机器人的刚性末端执行器可提供速度,强度和精度,而柔顺或柔软的抓手可提供可变性和更安全的人机交互。密歇根州立大学的一个工程师团队设计并开发了一种新颖的人形指针,可以弥补这一差距。
曹昌勇是密歇根州软机和电子实验室主任包装、机械工程、电气和计算机工程的教授,他说:
“新型的类人动物手设计是软硬混合柔性抓手。它可以产生比传统的纯软手更大的抓握力,同时比其他用于较重物体的手更稳定,可以进行精确的操纵。”
这项新的研究“通过柔性混合式气动执行器具有较大抓力的软人形机器人手”已发表在Soft Robotics上。
看起来,密歇根州立大学正在克服软爪的局限性。
通常,手抓手主要用于易碎,轻巧和不规则形状的环境中,但存在以下几个缺点:锋利的表面,抓握不平衡负载的稳定性差以及用于处理重负载的抓握力相对较弱。
在设计新模型时,曹昌勇和他的团队考虑了从水果采摘到敏感医疗等一系列人与环境的相互作用。他们发现某些过程需要与易碎物品进行安全但牢固的交互。现有的大多数夹持系统都不适合这些目的。
密歇根州立大学的团队解释说,这种设计的新颖性造就了一个原型,展示出了一种灵敏,快速,轻便的夹持器的优点,该夹持器能够处理传统上需要不同类型夹持系统的许多任务。
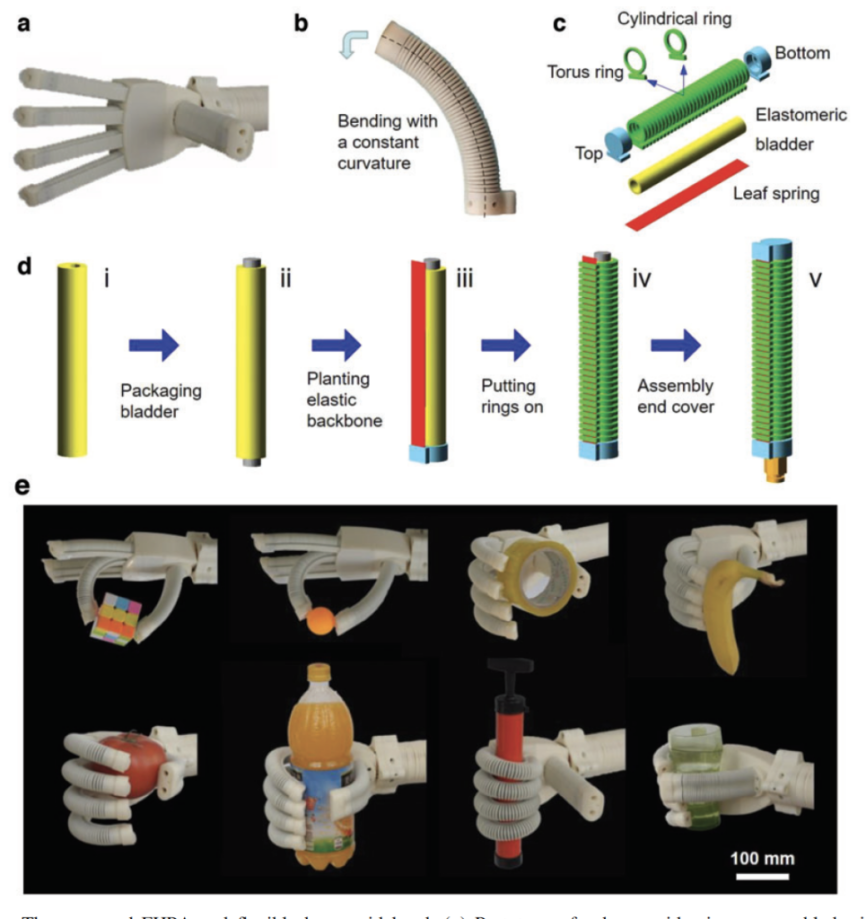
人形柔软手的每个手指由柔性混合气动致动器(或FHPA)构成,该致动器由压缩空气驱动弯曲,从而形成了模块化的运动框架,其中每个手指彼此独立地运动。
混合机器人手适应重负载
曹教授解释说:
“用于工业应用的传统刚性夹持器通常由简单但可靠的刚性结构制成,有助于产生较大的力,高精度和可重复性。拟议中的柔软人形手在抓握复杂形状和易碎物体时表现出出色的适应性和兼容性,同时保持了较高的刚度,可施加强大的夹紧力来举起重物。”
曹昌勇教授
他说,从本质上讲,两全其美。FHPA由硬组分和软组分组成,围绕致动气囊和骨状弹簧芯的独特结构组合构建。他认为,它们结合了软爪的可变形性,适应性和柔顺性的优点,同时保持了来自执行器刚度的较大输出力。”
可能的应用和未来研究
曹昌勇教授说,该原型在水果采摘,自动包装,医疗,康复和外科手术机器人等行业可能有用。
该团队希望在未来的研发中有足够的空间,希望将其先进技术与曹最近在所谓的智能抓手方面的工作相结合,将印刷传感器集成到抓手材料中。通过将混合机械手与软臂结合,研究人员旨在更精确地模拟精确的人类动作。
该论文的合著者包括刘晓敏,密苏里州立大学的学生Shoue Chen,密歇根州立大学的电气与计算机工程系的谭晓波教授以及北华大学的赵云伟和耿德旭。
这项研究部分由美国农业部-国家粮食与农业研究所(1016788),MSU战略伙伴基金,中国国家自然科学基金(51275004)和MSU启动基金资助。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号