3.2 实例应用过程
采用无人机机载三维激光雷达+地面站补点的方式作业,外业投入 3 人,航飞了 20 个架次( 采用大疆飞行平台,航时有限,每架次只能飞行 16 min) ,外 业数据采集完,经过内业点云数据解算,坐标转换,再经过自主研发的 SouthLidar 软件中进行地形地籍图生产,最终生成 DLG 成果。如图 6 所示。将采集的 191 个检查点跟激光点云的地面点数据做比较,由软件自动生成图 7 中报告,最终得出高程精度中误差为 6.9 cm,116 个检查点得出的高程精度中误差为 5.1 cm,完全满足 1 ∶ 500 航测高程精度要求。

图6 设计无人机航线外业采集现场(根据激光参数)
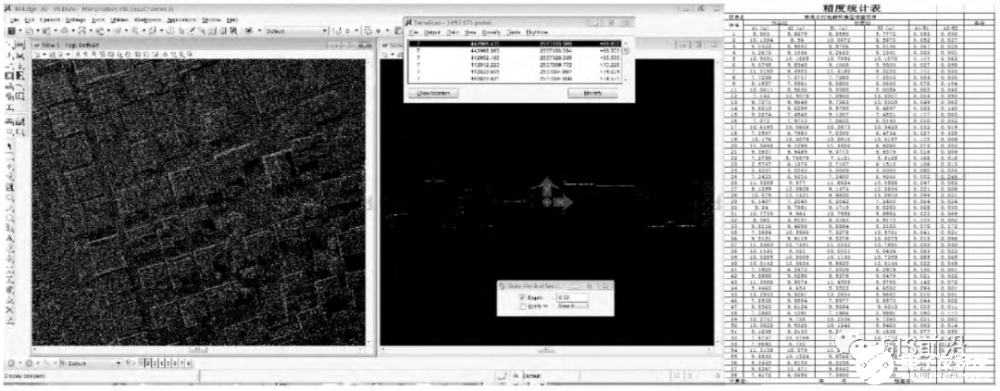
图7 点云处理及精度监测
3.3 技术创新及 4D 产品生成
基于无人机机载三维激光雷达和地面站补点方式的技术创新如图 8—图10 所示。
( 1) 直接快速生成 DEM、DSM、DLG、DOM 等产品,达到定测、施工图设计的精度要求。
( 2) 应用机载 LiDAR 生成 0.15 m 高精度的数字地面模型,有效克服了气候多变、地形复杂、植被茂盛等难题。
( 3) 无需或极少量控制测量,减少勘察设计环节和流程,大大缩短了工作周期,提高了工作效率。由于地形条件的限制在外业采集的碎部点很难一次性生成理想的等高线,如楼顶上控制点,另外还图生产,最终生成 DLG 成果。如图6所示。将采集的 191 个检查点跟激光点云的地面点数据做比较,由软件自动生成图 7 中报告,最终得出高程精度中误差为 6.9 cm,116 个检查点得出的高程精度中误差为 5.1 cm,完全满足 1 : 500 航测高程精度要求。因现实地貌的多样性和复杂性,自动构成的数字地面模型与实际地貌不太一致,因此可以通过修改三角网修改这些局部不合理的地方。具体技术有:
( 1) 过滤三角形。可根据需要输入符合三角形中最小角的度数或最大边长大于最小边长的倍数等条件的三角形。如果出现 CASS 7.0 在建立三角网后点无法绘制等高线,可过滤掉部分形状特殊的三角形。另外,如果生成的等高线不光滑,也可以用此功能将不符合要求的三角形过滤掉,再生成等高线。
( 2) 增加三角形。如果要增加三角形时,可选择“等高线”菜单中的“增加三角形”项,依照屏幕的提示在要增加三角形的地方用鼠标点取,如果点取的地方没有高程点,系统会提示输入高程。
( 3) 三角形内插点。选择此命令后,可根据提示输入要插入的点在三角形中指定点( 可输入坐标或用鼠标直接点取) ; 提示高程( 米) = 时,输入此点高程。通过此功能可将此点与相邻的三角形顶点相连构成新三角形,同时原三角形会自动被删除,如图 11 所示。
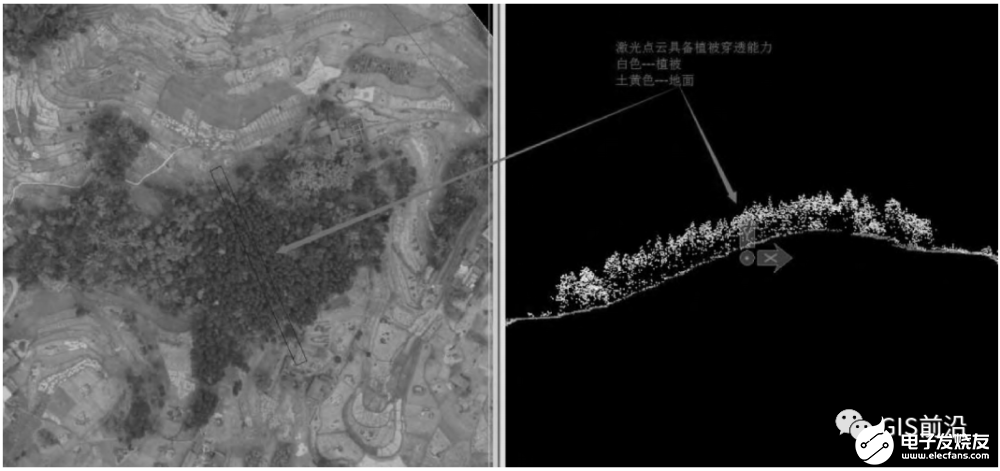
图 8 基于激光雷达的植被穿透直接获取地面点的数据
图 9 基于车载三维数据采集系统模型的数据采集技术

图 10 制作系统空间同步数据———重复轨迹检校方法

图 11 快速采集城市街景图( 南方 SouthLiDAR 软件)
04 结论与建议
基于空地一体扫描技术的车载三维数据采集系统在高楼大厦林立的城市中运行,GPS 信号时有时无。又由于交通状况的影响,车载平台时走时停,这些都使得车载系统的工作环境十分独特,同时也会存在容易失锁的地方: 如立交桥、过街天桥、高楼底下、两边是树的林荫道,一般失锁时间为 30s,因此本文关心组合导航系统的精度主要是关心在失锁30s 或 1 min 之后可以达到的精度。总体而言,空地一体扫描技术是现阶段较为新颖的技术,相对于传统全站仪、RTK技术而言,具有非接触式、效率高、速度快等优势,相对于无人机航测技术而言说具有全天候作业、高程精度高、可穿透植被缝隙直接获取真实地面高程的优势,因此在高精度地面高程测绘、地籍测绘、电力巡线、应急监测、森林植被采集及滩涂等人工无法到达的作业环境等领域有其巨大的优势,本文关于空地一体扫描技术及其应用进行分析和探讨,以及对于我国三维激光技术的推广,起到一定的促进作用。












 粤公网安备 44010602004358号
粤公网安备 44010602004358号